



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
This radar can detect objects located at distances between 2 cm and 1 meter and displays the value of distance to the object. The object detection is performed inside an angle of 180 degrees. The motion sensor that covers this angle uses a stepper motor. Data are presented on a PC monitor, the motor movement being synchronized with the browsing of the radar screen.
With a small modification of the ultrasonic sensor module, this radar is capable of detecting multiple objects with each ping, which means that it can also detect an object behind an obstacle. Points on the radar display, representing primary objects are displayed in red, and points representing secondary objects are displayed in blue.
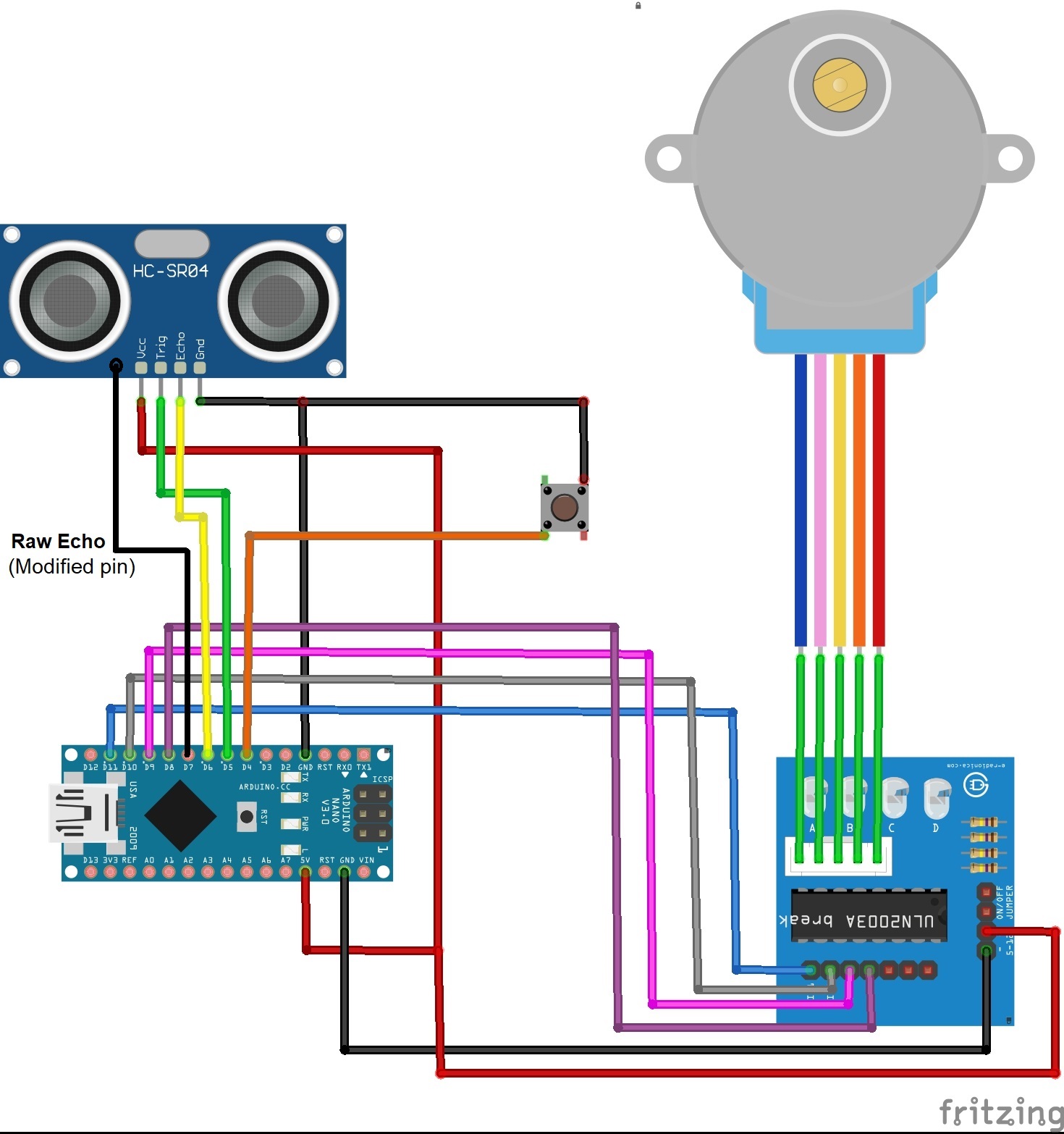
Device is very simple to build and consist only a few components:
-Arduino Nano microcontroller
- Modified HC-SR 04 ultrasonic sensor modified with Raw Echo pin
- (28byj-48) Small 5V stepper motor
- ULN2003 driver board for stepper
- and micro switch
Arduino data is sent to the personal computer via USB. The received signals are processed in the Processing program which generates a nice graphical user interface in the form of Radar. A microswitch is necessary as it is not possible to rotate the stepper motor by hand due to its internal gearing. The azimuth and distance of each primary feature are shown in red. Any echo from a secondary object is displayed in blue. Without changing the sensor, you will only see red objects. More distant objects require more surface area since most of the acoustic energy is lost as the beam propagates, plus back echo also propagates.
First we turn on the power supply and the radar is set to its initial position by means of the microswitch. Then through the USB cable we connect the radar with the Processing program of the PC. Now we start the Processing code and the Radar starts scanning.
// ======================
// globals
// ======================
// ----- serial port
#define Baud_rate 9600 //communication speed
// ----- serial input
char Char;
// ----- micro-switch
#define Micro_switch 4
bool Switch_present = true; //no micro-switch = false
// ----- HC-SR04 / HY-SRF05 ultrasonic transducer
#define Trig 5
#define Echo 6
#define RawEcho 7 //extra wire connected to pin 10 (see text)
// ----- motor controller definitions
/*
Connect your motor controller pins IN1..IN4 to the following Arduino pins.
The Arduino "talks" directly to controller pins IN1..IN4 via PORTB.
*/
#define IN4 8
#define IN3 9
#define IN2 10
#define IN1 11
// ----- motor definitions
/*
The 28BJY-48 5V DC motor has a "stride Angle" of 5.625/64 degrees per step.
One complete revolution therefore requires 360/5.625*64 equals 4096 steps.
This motor may be run using one of three possible modes:
1. Wave-stepping: lowest torque, max speed, coarse movement
2. Full-stepping: highest torque, max speed, coarse movement
3. Half-stepping: medium torque, half speed, smooth movement
From experiment "full-stepping" (which has the most torque) requires a minimum
delay of 2mS for reliable starting, whereas "half-stepping" only requires 1mS.
As a result the rotation speeds are the same. Since there is no speed advantage
"half-stepping" has been chosen for smoothness of rotation and reliable starting.
The required "half-stepping" motor pattern to achieve this is shown below.
*/
// ----- motor pattern
byte Motor[8] = //half-stepping
{ B00001000,
B00001100,
B00000100,
B00000110,
B00000010,
B00000011,
B00000001,
B00001001
};
int Index = 0; //Motor[] array index
int Step_counter = 0; //180 degrees requires 2048 steps
unsigned long Delay = 2; //give motor shaft time to move
byte Pattern; //Motor[] pattern
// ----- acoustic "radar" display data
int Azimuth = 0; //Azimuth (PI/128 radians) measured CCW from reference
int Distance1 = 0;
int Distance2 = 0;
int Direction = 0; //counter-clockwise=0, clockwise=1
unsigned long
Speed_of_rotation = 30; //controls beam rotation: 1 = fastest
// ======================
// setup
// ======================
void setup()
{
// ----- configure serial port
Serial.begin(Baud_rate);
// ----- configure micro-switch
pinMode(Micro_switch, INPUT_PULLUP); //"wire-OR" normally HIGH
// ----- configure arduino pinouts
pinMode(Echo, INPUT); //make Echo pin an input
pinMode(RawEcho, INPUT); //make RawEcho pin an input
pinMode(Trig, OUTPUT); //set Trig pin LOW
digitalWrite(Trig, LOW);
// ----- configure stepper motor
Pattern = DDRB; // get PORTB data directions
Pattern = Pattern | B00001111; // preserve MSN data direction &
DDRB = Pattern; // make pins 8,9,10,11 outputs
// ----- rotate beam to start-up position
if (Switch_present)
{
home();
}
// ----- attach the graphics display
connect_to_display(); //connect to the display
}
// ======================
// loop
// ======================
void loop()
{
// ----- has the display asked for data
if (Serial.available() > 0)
{
Char = Serial.read(); // read character
// ----- send data to display whenever a send character ('S') is received
if (Char == 'S')
{
// ----- measure distances
measure();
// ----- rotate beam to next ping position
rotate();
// ----- send the results to the display
Serial.print(Azimuth);
Serial.print(',');
Serial.print(Distance1);
Serial.print(',');
Serial.print(Distance2);
Serial.print(',');
Serial.println(Direction);
delay(Speed_of_rotation); //slows rotational speed
}
}
}
// ===============================
// connect to graphics display
// ===============================
void connect_to_display()
{
while (Serial.available() <= 0)
{
// ----- keep sending synch ('S') until the display responds
Serial.println("S");
delay(250);
}
}
// ===============================
// measure distances
// ===============================
void measure()
{
// ----- locals
unsigned long start_time; //microseconds
unsigned long finish_time; //microseconds
unsigned long time_taken; //microseconds
unsigned long timeout; //microseconds
unsigned long pause; //microseconds
boolean flag;
// ----- generate 10uS start pulse
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
// ----- wait for pulse(s) to be sent
while (!digitalRead(Echo)); //wait for high
start_time = micros();
// ----- set timeout radius
timeout = start_time + 12000; //set timeout radius to 2 meters
// ----- measure first object distance
flag = false;
while (!flag)
{
if (!digitalRead(Echo)) flag = true; //exit loop if object detected
if (timeout < micros()) flag = true; //exit loop if timeout exceeded
}
finish_time = micros();
// ----- calculate first object distance(cm)
time_taken = finish_time - start_time;
Distance1 = ((float)time_taken) / 59;
// ----- wait for first object echo to finish
pause = finish_time + 1000; //1000uS means 17cm closest object spacing
while (pause > micros()); //wait 1000uS
// ----- measure second object distance
flag = false;
while (!flag) //wait for high
{
if (digitalRead(RawEcho)) flag = true; //exit loop if object dectected
if (timeout < micros()) flag = true; //exit loop if timeout exceeded
}
finish_time = micros();
// ----- calculate second object distance (cm)
time_taken = finish_time - start_time;
Distance2 = ((float)time_taken) / 59;
}
// ===============================
// rotate motor to next ping position
// ===============================
void rotate()
{
// ----- counter-clockwise scan
if (Direction == 0)
{
for (int i = 0; i < 8; i++)
{
// ----- rotate motor to next ping position
Index = Step_counter % 8; //calculate array index
Pattern = PORTB; //get current motor pattern
Pattern = Pattern & B11110000; //preserve MSN
Pattern = Pattern | Motor[Index]; //create new motor pattern
PORTB = Pattern; //send new pattern to motor
Step_counter++;
delay(Delay); //controls motor speed (fastest=1)
}
// ----- loop control
Azimuth++;
if (Azimuth > 256)
{
Azimuth = 256;
Direction = 1;
Step_counter = 2048;
}
}
else
{
// ----- clockwise scan
for (int i = 0; i < 8; i++)
{
// ----- rotate motor to next ping position
Index = Step_counter % 8; //calculate array index
Pattern = PORTB; //get current motor pattern
Pattern = Pattern & B11110000; //preserve MSN
Pattern = Pattern | Motor[Index]; //create new motor pattern
PORTB = Pattern; //send new pattern to motor
Step_counter--;
delay(Delay); //controls motor speed (fastest=1)
}
// ----- loop control
Azimuth--; //decrement Azimuth every 8 steps
if (Azimuth < 0)
{
Azimuth = 0;
Direction = 0;
Step_counter = 0;
}
}
}
// ===============================
// find zero position for beam
// ===============================
void home()
{
// ----- rotate clockwise until limit switch operates
Step_counter = 2048;
while (digitalRead(Micro_switch))
{
Index = Step_counter % 8; //calculate array index
Pattern = PORTB; //get current motor pattern
Pattern = Pattern & B11110000; //preserve MSN
Pattern = Pattern | Motor[Index]; //create new motor pattern
PORTB = Pattern; //send new pattern to motor
Step_counter--;
delay(Delay); //controls motor speed (fastest=1)
}
// ----- back off slightly
/*
Keep clear of limit switch during normal scans
*/
Step_counter = 0;
for (int i = 0; i < 250; i++)
{
Index = Step_counter % 8; //calculate array index
Pattern = PORTB; //get current motor pattern
Pattern = Pattern & B11110000; //preserve MSN
Pattern = Pattern | Motor[Index]; //create new motor pattern
PORTB = Pattern; //send new pattern to motor
Step_counter++;
delay(Delay); //controls motor speed (fastest=1)
}
// ----- reset the step counter
Step_counter = 0;
}
// ======================
// globals
// ======================
// ----- serial port
import processing.serial.*; //import the serial library
Serial myPort; //the Serial port object
final int Baud_rate = 9600; //communication speed
String Input_string; //for incoming data
boolean Connected = false; //flag
// ----- display graphics
PGraphics Canvas; //name of drawing area to be created
PFont myFont; //name of font to be created
// ----- ultrasonic beam
int Azimuth = 0; //radians (180 degrees equals PI radians)
int [][] Ping = new int [257][2]; //257 rows of 2 columns
int Direction = 0; //scan direction: true=CW, false=CCW
// ======================
// setup
// ======================
void setup()
{
// ----- image window
//size(900, 600, P3D); //P3D parameter allows rotation around Z-axis
//size(1200, 800, P3D); //P3D parameter allows rotation around Z-axis
size(1050, 700, P3D);
// ----- create a drawing area for fading the beam
Canvas = createGraphics(width, height);
// ------ create the screen font
myFont = createFont("Arial Black", 20);
// ----- initialize the serial port
printArray(Serial.list()); //lists your COM ports on screen
myPort = new Serial(this, Serial.list()[2], Baud_rate);
myPort.bufferUntil('\n');
}
// ======================
// draw
// ======================
void draw()
{
// ----- define colors, scale, & text
background(0); //black background
textFont(myFont, 20); //specify font to be used
// ----- draw beam on its own canvas
Canvas.beginDraw();
Canvas.translate(width/2, height*0.8); //beam origin
Canvas.stroke(0, 255, 0); //green beam
Canvas.strokeWeight(7); //set beam-width
Canvas.scale(0.8); //think 100% but scale 80%
Canvas.rotate(-Azimuth*PI/256); //rotate "sheet of paper" but
Canvas.line(0, 0, width/2, 0); //think horizontal lines
Canvas.endDraw();
// ----- draw the graticule
draw_graticule();
// ----- plot CCW data
if (Direction == 0)
{
for (int i=0; i<Azimuth+1; i++)
{
plot_data(i); //plot data points BELOW azimuth
}
}
// ----- plot CW data
if (Direction == 1)
{
for (int i=Azimuth; i<257; i++)
{
plot_data(i); //plot data points ABOVE azimuth
}
}
// ----- superimpose beam over the display canvas
image(Canvas, 0, 0);
// ----- fade the beam
fadeGraphics(Canvas, 5); //the number controls the beam width
}
// =======================
// serial event (called with each Arduino data string)
// =======================
void serialEvent(Serial myPort)
{
// ----- wait for a line-feed
Input_string = myPort.readStringUntil('\n');
// ----- validate
if (Input_string != null)
{
// ----- trim whitespace
Input_string = trim(Input_string);
println(Input_string);
// ----- make contact
if (Connected == false)
{
if (Input_string.equals("S"))
{
// ----- set flag
Connected = true; //connection made
// ----- request data
myPort.clear(); //clear the receive buffer
myPort.write("S"); //request data
}
} else
// ----- send data
{
Input_string = trim(Input_string); //remove leading/trailing whitespace
println(Input_string);
int[] values = int(split(Input_string, ','));
Azimuth = values[0];
Ping[Azimuth][0] = values[1];
Ping[Azimuth][1] = values[2];
Direction = values[3];
println(Azimuth);
println(Ping[Azimuth][0]);
println(Ping[Azimuth][1]);
println(Direction);
myPort.clear(); //clear the receive buffer
myPort.write("S");
}
}
}
// =======================
// draw graticule (horizontal text)
// =======================
void draw_graticule()
{
// ----- setup
pushMatrix(); //save screen parameters
translate(width/2, height*0.8); //move the origin
scale(0.8); //scale everything 80%
// ----- draw the arcs
stroke(128); //use gray lines
arc(0, 0, width, -width, 0, PI, CHORD); //CHORD draws the baseline
arc(0, 0, width*0.75, -width*0.75, 0, PI, OPEN);
arc(0, 0, width*0.5, -width*0.5, 0, PI, OPEN);
arc(0, 0, width*0.25, -width*0.25, 0, PI, OPEN);
// ----- draw the radials
pushMatrix(); //save screen parameters
stroke(128); //use gray lines
rotateZ(-radians(45)); //rotate the screen coordinates
line(0, 0, width/2, 0); //draw line at 45
rotateZ(-radians(45)); //rotate another 45 degrees
line(0, 0, width/2, 0); //draw line at 90
rotateZ(-radians(45)); //rotate another 45 degrees
line(0, 0, width/2, 0); //draw line at 135
popMatrix(); //restore screen parameters
// ----- label the radials
fill(0, 0, 255); //blue text
textAlign(LEFT, CENTER);
text("0", width/2+5, 0); //"0" degrees
textAlign(LEFT, BOTTOM);
text("45", width*0.35+5, -width*0.35); //"45" degrees
textAlign(RIGHT, BOTTOM);
text("90", -5, -width/2); //"90" degrees
textAlign(RIGHT, BOTTOM);
text("135", -width*0.35-5, -width*0.35); //"135" degrees
textAlign(RIGHT, CENTER);
text("180", -width/2-5, 0); //"180" degrees
// ----- label the arcs
fill(255); //light gray text
textAlign(LEFT, BOTTOM);
text("100cm", +5, -width/2); //"100cm"
text("75", +5, -width/2*0.75); //"75cm"
text("50", +5, -width/2*0.5); //"50cm"
text("25", +5, -width/2*0.25); //"25cm"
// ----- restore properties
strokeWeight(1);
fill(0); //white
stroke(255); //black
scale(1.0);
popMatrix(); //restore screen parameters
}
// =======================
// plot data
// =======================
void plot_data(int index)
{
// ----- setup
pushMatrix(); //save screen parameters
translate(width/2, height*0.8); //move the origin
scale(0.8);
// ----- plot array contents
rotateZ(-index*PI/256); //rotate the display coordinates
strokeWeight(5); //set data size
stroke(255, 0, 0); //set data1 color to red
if (Ping[index][0]>100) Ping[index][0] = 1000; //hide by printing off-screen
ellipse(width/2*Ping[index][0]/100, 0, 5, 5); //plot data1
stroke(0, 0, 255); //set data2 color to blue
if (Ping[index][1]>100) Ping[index][1] = 1000; //hide by printing off-screen
ellipse(width/2*Ping[index][1]/100, 0, 5, 5); //plot data2
// ----- restore defaults
strokeWeight(1);
stroke(0);
popMatrix(); //restore screen parameters
}
// =======================
// fadeGraphics
// =======================
/*
This fadeGraphics() routine was found at
https://forum.processing.org/two/discussion/13189/a-better-way-to-fade
*/
void fadeGraphics(PGraphics c, int fadeAmount)
{
c.beginDraw();
c.loadPixels();
// ----- iterate over pixels
for (int i =0; i<c.pixels.length; i++)
{
// ----- get alpha value
int alpha = (c.pixels[i] >> 24) & 0xFF ;
// ----- reduce alpha value
alpha = max(0, alpha-fadeAmount);
// ----- assign color with new alpha-value
c.pixels[i] = alpha<<24 | (c.pixels[i]) & 0xFFFFFF ;
}
Canvas.updatePixels();
Canvas.endDraw();
}


{kind=link}
Comments
Please log in or sign up to comment.