



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
The story
it will track flame,gaz,alcohol inside it and alert user when something is wrong
it can alert user when it falls too and also can open automatically from distance to protect user from touching surfaces that can pass viruses to his body
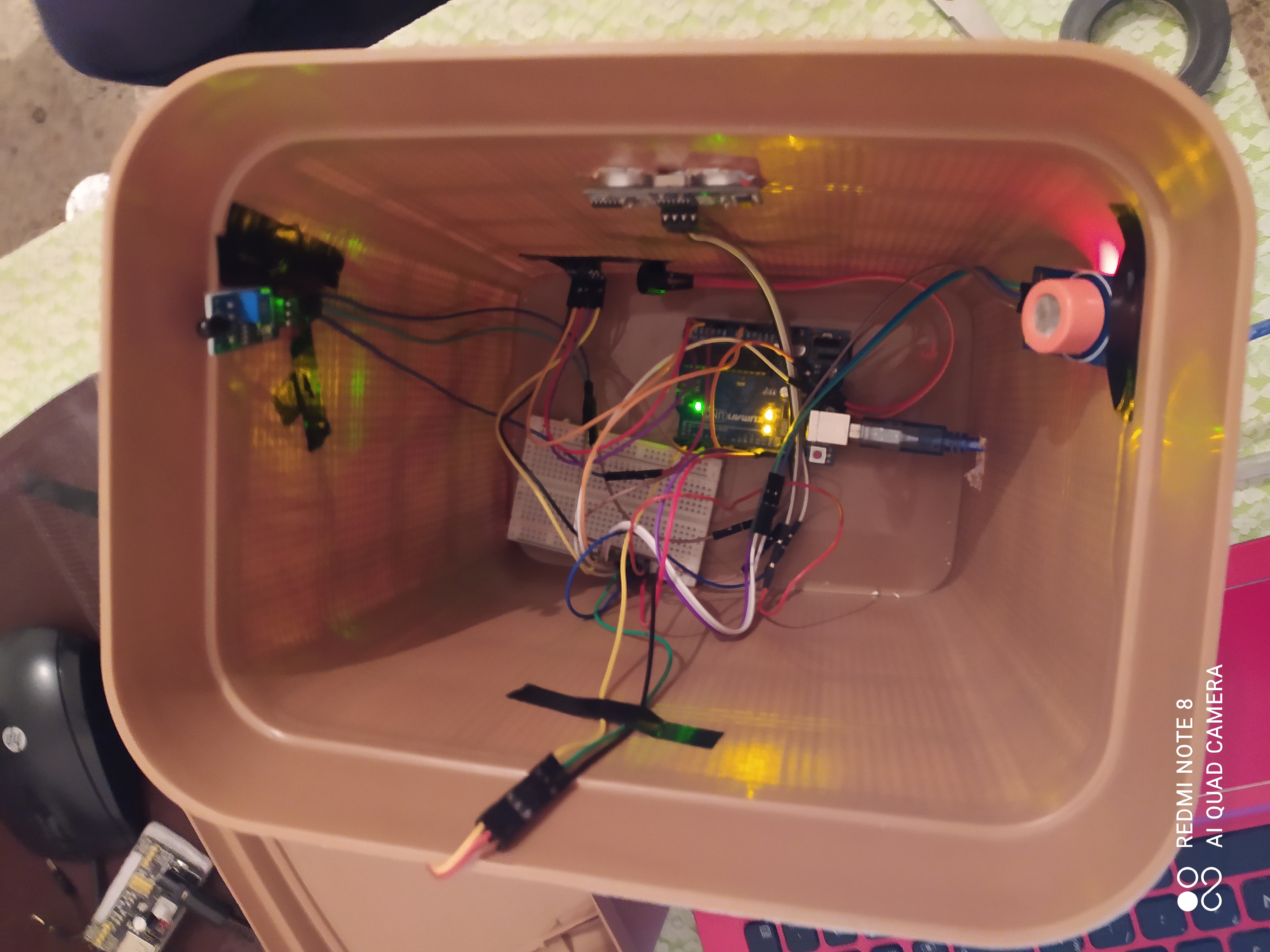
how it works ?
the garbage bin is monitored by 4 sensors all controlled by an arduino
- flame sensor
- alcohool and gaz detector
- orientation sensor
- distance sensor
1 / 3 • isn't it cute ?

{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.