



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Hey Guyzz...
In this pandemic I trust everybody is at home staying safe.
I made a new project named Cute Bot.
watch the whole video to make this project at home.
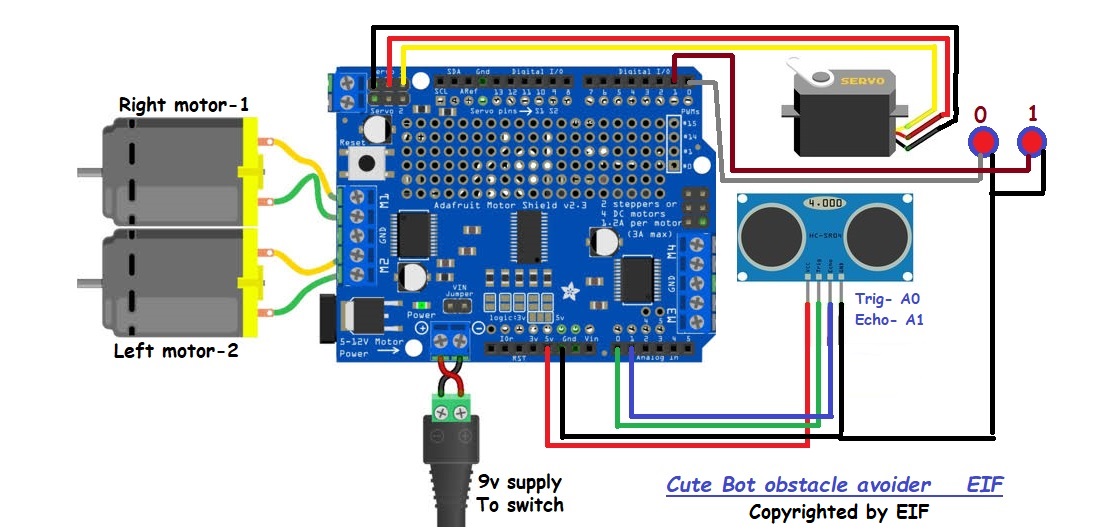
Basically this is a Obstacle Avoider Robot.
When there is any obstacle it senses and it head rotates searches the free space and then moves to that space.
If you like this project respect it.
Give me suggestions so I can improve it or any feedback you want to give to my YouTube channel.
link is : https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Also you can give me suggestions on "What I made next project.?"
Stepstomakethisproject:
1. Gather components like Arduino, Dc geared motors with wheels, ultrasonic sensor, servo motor, center wheel, cardboard, l293d motor driver shield, battery 9 v, switch, Jumper wires etc.
2. Take cardboard box and make head for the bot to place ultrasonic sensor and then servo motor.
3. Take another cardboard piece connect two gear motors and make a box.
4. Place 2 LEDs at front side of box.
5. Place Arduino and L293d motor driver shield in box and do connections.
6. Upload the code and check.
Your project is ready...!!!
Visit my YouTube channel once and see more interesting projects.
"Electronics is Fun"
If you like my channel subscribe it please.
link: https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g


{kind=link}
Comments
Please log in or sign up to comment.