



Hardware components | ||||||
 |
| × | 1 | |||
| × | 5 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
During this pandemic we all have to adapt and learn new habits, from not touching our faces, to washing our hands more often than usual, to paying attention to almost every surface we touche or interact with, and while we are going toward a new normal we need tools and solutions to help us adapt and be safe at the same time. especially for those of us who are still in the front line(doctors, nurses, policemen and women, etc...).
MotivationFor me the motivation behind creating this device is because my sister works at a hospital and i was always worried about her, and given my technical background i wanted to do something about it and help her and potentially help a lot of other people.
SolutionI thought what if we can have a wrist wearable device that can kill covid-19, this way we can eliminate the virus from the first time we touch it and we can avoid a lot of cases, hopefully. also this device can disinfect the surfaces we interact with thus limiting the spread of the virus.
This device can also have the ability to detect hand movement in order to warn us when we are about to touch our face, i think this may solve a big part of the problem too.
so i started looking for ways to kill the virus and be safe for human skin at the same time, that's where i found about FAR UVC light which is UV light with a wavelength of 220 nm (nanometers) on average, at this particular wavelength the UV can kill the virus by destroying the genetic material (DNA - RNA) without penetrating the skin.
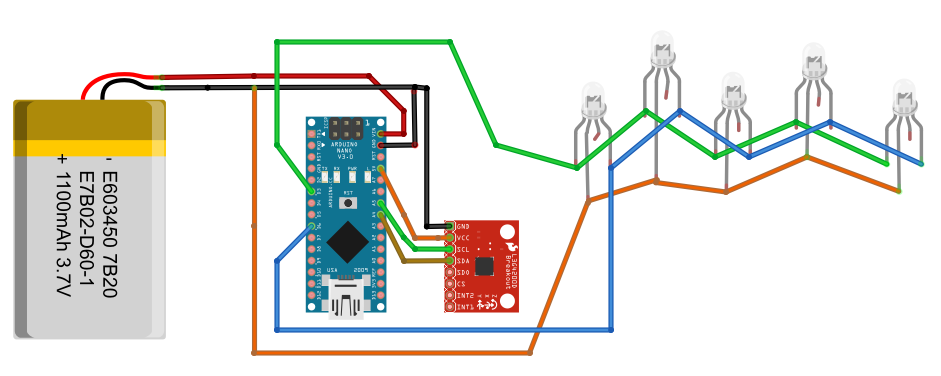
then i started prototyping the design of a wrist wearable device that uses Far UVC leds mounted around in order for the UV waves to reach all the hand, and with the IMU sensor integrated hand movement can be detected in order to alert the user when his/her hand is close to their face.
disclaimer: I couldn't get the far UVC leds shipped on time :/ to submit the project, so i used RGB leds to illustrate the idea behind the project.
after testing the circuit i designed and 3d printed the necessary parts to neatly integrate the device.
Finally i finished the code to detect hand movement and alert the user with blinking red leds when the user approaches his hand close to his face. below is the video that shows the device in action.
{kind=link}

Comments