


Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
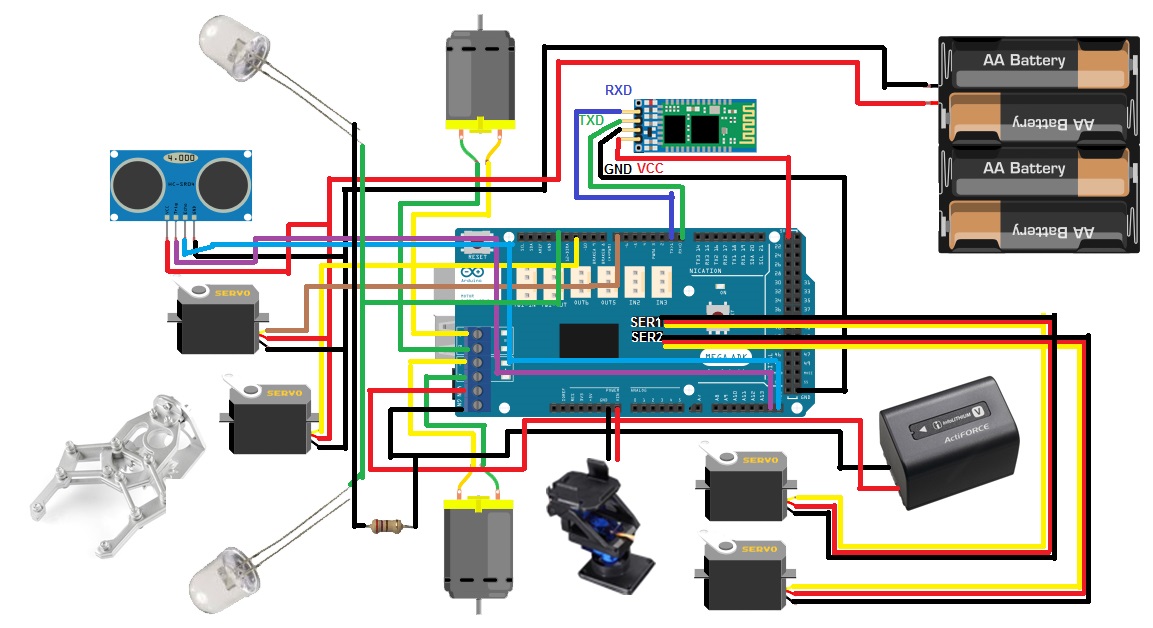
Everything is in the video.
Codes , libraries and the app are in this link:
https://drive.google.com/file/d/0By8bIv7JU0O0MHk1NU1Uc1BTTUk/view?usp=sharing
You can find the aia file in this link
https://drive.google.com/open?id=0By8bIv7JU0O0WjltNG8xcE8tX1U
#include <AFMotor.h>
#include <Servo.h>
#include <NewPing.h>
#define TRIG_PIN A14
#define ECHO_PIN A15
#define MAX_DISTANCE 200
#define MAX_SPEED 235
#define MAX_SPEED_OFFSET 20
AF_DCMotor motor1(4);
AF_DCMotor motor2(2);
Servo myservo1, myservo2, myservo3, myservo4;
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
boolean goesForward=false;
int distance = 100;
int speedSet = 0;
int lights = 13;
int headangle=60;
int neckangle=120;
char command;
void setup()
{
pinMode(lights, OUTPUT);
myservo1.attach(11);
myservo2.attach(9);
myservo3.attach(10);
myservo4.attach(7);
myservo4.write(135);
myservo1.write(0);
myservo2.write(headangle);
myservo3.write(neckangle);
int readPing();
delay(2000);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
Serial.begin(9600); //Set the baud rate to your Bluetooth module.
}
void forward()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
}
void backward()
{
motor1.setSpeed(255);
motor1.run(BACKWARD); //rotate the motor counterclockwise
motor2.setSpeed(255);
motor2.run(BACKWARD); //rotate the motor counterclockwise
}
void left()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(255);
motor2.run(BACKWARD);
}
void right()
{
motor1.setSpeed(255);
motor1.run(BACKWARD); //turn motor1 off
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
}
void camforward()
{
headangle=headangle+5;
myservo2.write(headangle);
myservo3.write(neckangle);
}
void cambackward()
{
headangle=headangle-5;
myservo2.write(headangle);
myservo3.write(neckangle);
}
void camleft()
{
neckangle=neckangle+5;
myservo2.write(headangle);
myservo3.write(neckangle);
}
void camright()
{
neckangle=neckangle-5;
myservo2.write(headangle);
myservo3.write(neckangle);
}
void lookAround(){
myservo2.write(60);
for (neckangle = 30; neckangle <= 180; neckangle += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo3.write(neckangle); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (neckangle = 180; neckangle >= 0; neckangle -= 1) { // goes from 180 degrees to 0 degrees
myservo3.write(neckangle); // tell servo to go to position in variable 'pos'
delay(60); // waits 15ms for the servo to reach the position
}
for (neckangle = 0; neckangle <= 100; neckangle += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo3.write(neckangle); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
}
void gripac()
{
myservo1.write(0);
}
void gripkapa()
{
myservo1.write(70);
}
int readPing() {
delay(70);
int cm = sonar.ping_cm();
if(cm==0)
{
cm = 250;
}
return cm;
}
int lookRight()
{
myservo4.write(50);
delay(500);
int distance = readPing();
delay(100);
myservo4.write(115);
return distance;
}
int lookLeft()
{
myservo4.write(170);
delay(500);
int distance = readPing();
delay(100);
myservo4.write(115);
return distance;
delay(100);
}
void moveStop() {
motor1.run(RELEASE);
motor2.run(RELEASE);
}
void moveForward() {
if(!goesForward)
{
goesForward=true;
motor1.run(FORWARD);
motor2.run(FORWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2) // slowly bring the speed up to avoid loading down the batteries too quickly
{
motor1.setSpeed(speedSet);
motor2.setSpeed(speedSet+MAX_SPEED_OFFSET);
delay(5);
}
}
}
void moveBackward() {
goesForward=false;
motor1.run(BACKWARD);
motor2.run(BACKWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2) // slowly bring the speed up to avoid loading down the batteries too quickly
{
motor1.setSpeed(speedSet);
motor2.setSpeed(speedSet+MAX_SPEED_OFFSET);
delay(5);
}
}
void turnRight() {
motor2.run(FORWARD);
motor1.run(BACKWARD);
delay(300);
motor2.run(FORWARD);
motor1.run(FORWARD);
}
void turnLeft() {
motor2.run(BACKWARD);
motor1.run(FORWARD);
delay(300);
motor2.run(FORWARD);
motor1.run(FORWARD);
}
void Stop()
{
motor1.setSpeed(0); //Define maximum velocity
motor1.run(RELEASE); //rotate the motor clockwise
motor2.setSpeed(0);
motor2.run(RELEASE); //turn motor2 off
}
void otoac()
{
long duration, distance;
while(command='A'){
int distanceR = 0;
int distanceL = 0;
delay(40);
if(distance<=24)
{
moveStop();
delay(100);
moveBackward();
delay(300);
moveStop();
delay(200);
distanceR = lookRight();
delay(200);
distanceL = lookLeft();
delay(200);
if(distanceR>=distanceL)
{
turnRight();
moveStop();
}else
{
turnLeft();
moveStop();
}
}else
{
moveForward();
}
distance = readPing();
}
}
void otokapa()
{
motor1.setSpeed(0);
motor2.run(RELEASE); //turn motor1 off
motor2.setSpeed(0);
motor2.run(RELEASE); //turn motor2 off
}
void loop(){
if(Serial.available() > 0){
command = Serial.read();
Stop();
switch(command){
case 'F':
forward();
break;
case 'B':
backward();
break;
case 'L':
left();
break;
case 'R':
right();
break;
case 'G':
camforward();
break;
case 'I':
cambackward();
break;
case 'H':
camleft();
break;
case 'J':
camright();
break;
case 'W':
gripac();
break;
case 'w':
gripkapa();
break;
case 'P':
Stop();
break;
case 'U':
myservo2.write(10);
myservo3.write(30);
break;
case 'D':
lookAround();
break;
case 'S':
digitalWrite(lights, HIGH);
break;
case 's':
digitalWrite(lights, LOW);
break;
case 'A':
otoac();
break;
case 'a':
otokapa();
break;
}
}
}






{kind=link}
Comments
Please log in or sign up to comment.