A One Demo Wonder
By utilizing a video-language model and computer simulations, RoboCLIP can teach robots a new skill after seeing just one demonstration.

Teaching robots to perform new tasks is a complex and evolving field of study that has seen significant advancements in recent years, largely owing to the application of reinforcement learning. Reinforcement learning is a machine learning paradigm where an agent learns to perform tasks through trial and error, receiving feedback in the form of rewards or penalties based on its actions. This approach has demonstrated remarkable success in training robots to acquire new skills, allowing them to adapt and improve their performance over time.
One of the notable successes of reinforcement learning in robotics is in the domain of robotic manipulation and control. Robots have been trained to grasp objects, navigate environments, and even perform intricate tasks such as folding laundry or assembling objects. The adaptability and versatility of reinforcement learning make it an appealing choice for imparting intelligence to robots, enabling them to handle a diverse range of activities.
Despite its successes, a significant challenge hindering the widespread deployment of general-purpose robots is the considerable amount of training data and computational resources required by reinforcement learning algorithms. Training a robot to master a single task often demands extensive datasets and substantial computing power, making it a resource-intensive process. This limitation becomes especially pronounced when a robot needs to learn a multitude of tasks for practical applications in households, where versatility is crucial.
It is this problem of scalability that a team led by engineers at the University of Southern California has recently attempted to tackle. They have developed a system called RoboCLIP that allows robots to learn a new task after being given just a few — sometimes just one — demonstrations of the task being performed. The demonstrations can be given in the form of either videos or textual descriptions.
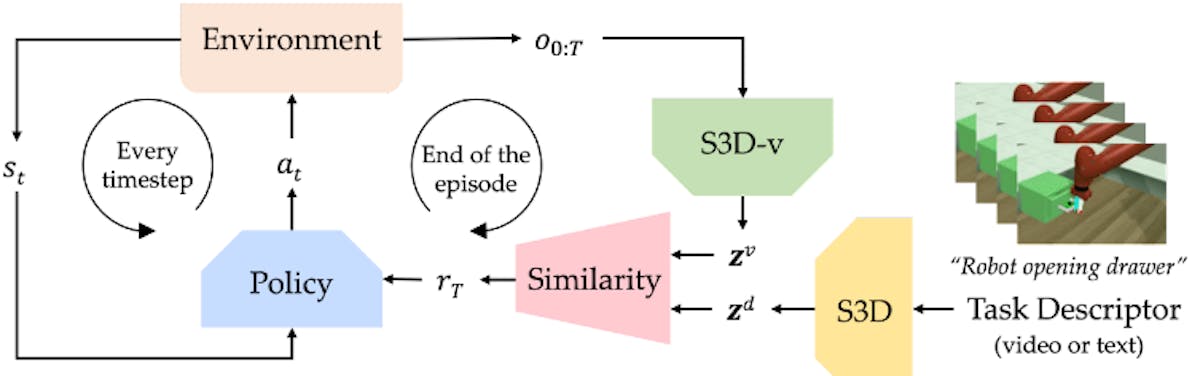
At the core of RoboCLIP is a large video-language model that was pre-trained on a large dataset consisting of videos and textual descriptions of tasks being performed. The system leverages the massive store of knowledge contained in this data, then combines it with the power of computational simulations. Rather than requiring a user to supply hundreds or thousands of demonstrations, RoboCLIP instead requires as little as one. It then uses this information to kick off a series of simulations. As the simulated robot attempts the task, and inevitably fails, insights are gathered that help it to quickly improve — simulations can happen much faster than real-world demonstrations. When the simulations arrive at a good solution, that data can be leveraged to update the model and add that new task to the robot’s skill set.
To date, the RoboCLIP system has only been tested on simulated robots. But these simulations do show that it gives robots the ability to quickly learn new tasks from a single demonstration. In the future, that capability could open the door to the development of general-purpose robots that can help us with all manner of activities. The researchers speculate that they could provide assistance to the elderly and their caregivers. They also pointed out that many people watch videos before making household repairs and noted that perhaps one day RoboCLIP could watch those videos and make the repairs for us. These goals may still be many years off, but the possibilities are very exciting.

R&D, creativity, and building the next big thing you never knew you wanted are my specialties.