Compact Joey Robots, with 3D-Printed "Wheel-Legs," Navigate Tight Pipes for Mapping and Maintenance
Built around an STM32 and with an optional ESP32-CAM module for vision, Joey is a self-reliant pipe-crawler with style.


Researchers at the University of Leeds and the Delft University of Technology have built a compact microcontroller-driven robot, Joey, which is designed to explore and assess pipework — and fits in the palm of your hand.
"Underground water and sewer networks are some of the least hospitable environments, not only for humans, but also for robots. Sat Nav is not accessible underground," explains first author Thanh Luan Nguyen, PhD and the scientist responsible for the robots' control algorithms. "And Joeys are tiny, so have to function with very simple motors, sensors, and computers that take little space, while the small batteries must be able to operate for long enough."
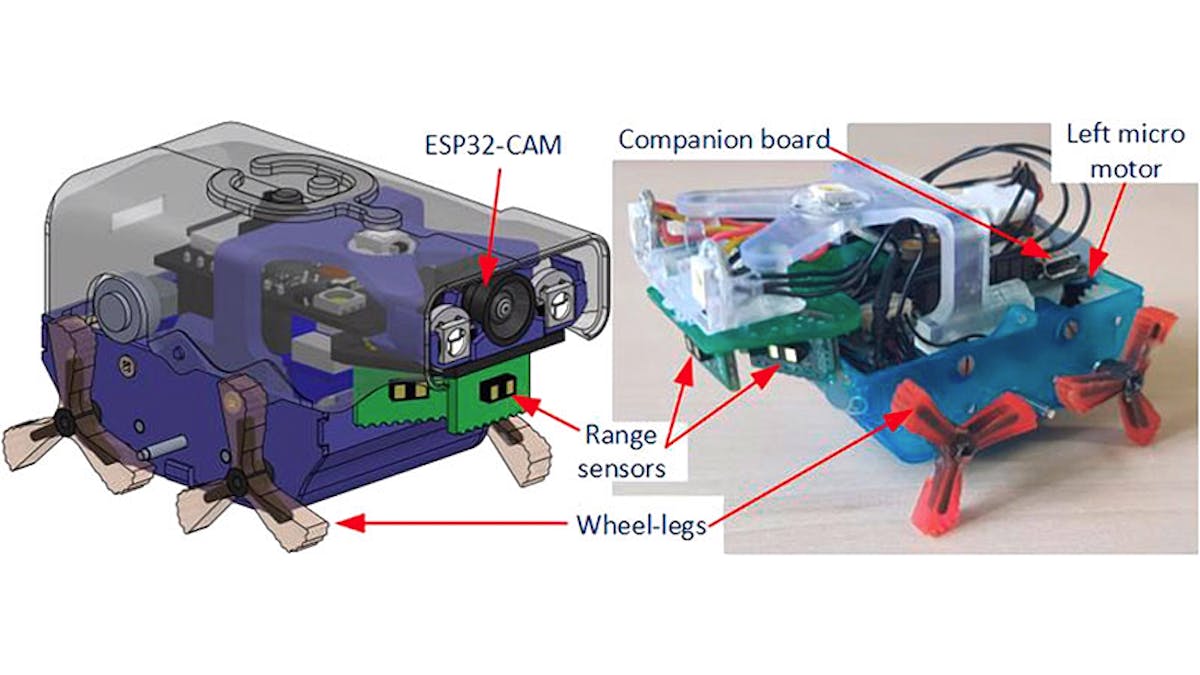
Each compact Joey robot is built from two micro-motors, connected to 3D-printed "wheel-legs" on each side via spur gears and using a skid steering mechanism, with the core design featuring an STMicro STM32WB5MMG microcontroller with Bluetooth 5.0 Low Energy (BLE), Zigbee, and OpenThread support, three STMicroelectronics VL54L1X time-of-flight range sensors, an InvenSense ICM-20948 inertial measurement unit (IMU), and an STMicro IMP34DT05 MEMS microphone. An extended design which incorporates streaming video or local capture capabilities provides room for an Espressif ESP32-CAM AI Thinker board plus three WorldSemi WS2812 LEDs for illumination.
"The miniature Joey robot is entirely autonomous," the researchers explain, "and operates without any tethered cables. When tested in a 100mm [around 3.94"] pipe section/network, the Joey successfully walks while monitoring its accelerations and orientations with the integrated IMU, monitor the distances from the robot's front to the closest straight front, front-left and front-right pipe wall/object with range sensors, monitor the left/right wheel-leg rotation with encoders, and record videos of the pipe conditions with on board camera and SD card. All recorded video and data can then be post-processed on a computer for pipe condition monitoring, asset mapping, maintenance, and upgrade."
A crucial part of the Joey's capabilities is its ability to navigate without relying on computer vision, turning the camera on only when an area of interest is reached. In testing, the robots proved capable of exploring around 3.3 feet of pipe in 45 seconds, including navigating turns, obstacles, dead-ends, and slopes — and even, in further tests, pipes with sand and dish-washing liquid inside. Their only real weakness: an inability to right themselves if flipped.
"Ultimately we hope to design a system that can inspect and map the condition of extensive pipe networks, monitor the pipes over time, and even execute some maintenance and repair tasks," says final author Netta Cohen, PhD. "We envision the technology to scale up and diversify, creating an ecology of multi-species of robots that collaborate underground. In this scenario, groups of Joeys would be deployed by larger robots that have more power and capabilities but are restricted to the larger pipes. Meeting this challenge will require more research, development, and testing over 10 to 20 years. It may start to come into play around 2040 or 2050."
The team's work has been published under open-access terms in the journal Frontiers in Robotics and AI.
Freelance journalist, technical author, hacker, tinkerer, erstwhile sysadmin. For hire: freelance@halfacree.co.uk.