Shaping Tomorrow's Soft Robots
MIT's new algorithm starts with the big picture, then drills down to make control of reconfigurable soft robots a solvable problem.

The development of reconfigurable soft robots is a nascent area in the world of robotics. These shape-shifting robots can alter their configuration in real-time, allowing them to navigate complex and dynamic environments with greater efficiency and resilience than their rigid counterparts. Through advanced sensing and control systems, these robots can autonomously adapt their morphology in response to environmental changes, obstacles, or task requirements. For instance, a soft reconfigurable robot could elongate to traverse narrow passages, flatten to squeeze through tight spaces, or even split into multiple smaller units to tackle multiple objectives simultaneously.
While there are many potential uses for soft reconfigurable robots, medical applications tend to get the most attention. In the future, they might prove to be invaluable for minimally invasive surgeries, where their ability to deform and adapt could enable precise and delicate maneuvers within the human body.
But despite the significant progress that has been made in the laboratory, practical implementations of soft reconfigurable robots for real-world applications remain a considerable challenge. Current prototypes often face limitations related to the complex control systems that are required, issues with inefficient energy consumption, and durability concerns. A group of researchers at MIT and Tsinghua University wanted to get ahead of the curve and tackle the issues that surround control systems, even before shape-shifters become a practical reality. They also developed a simulated environment that allows reconfigurable robots to be evaluated since real-world implementations are still hard to come by.
The major challenge in controlling reconfigurable soft robots is that they can have thousands of degrees of freedom — many small muscles exist throughout the entire structure. This is not compatible with reinforcement learning, which is the traditional machine learning algorithm through which robots learn complex tasks via trial and error. The number of possible ways that a reconfigurable robot can move is so large that the complexity of the problem balloons exponentially, making it intractable.
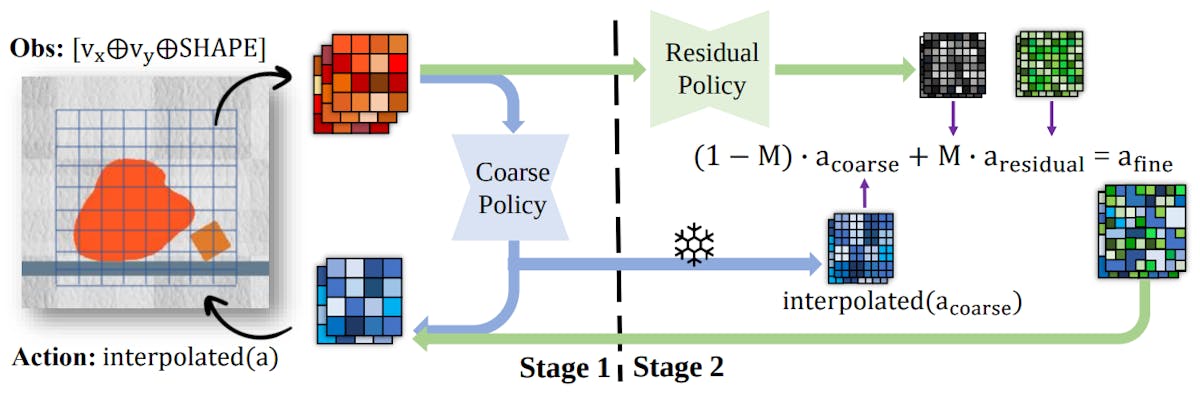
To get around this issue, the researchers grouped together nearby muscles, such that they could be controlled as a unit initially. This made it possible for reinforcement learning to figure out how to complete tasks, within a reasonable amount of time, if only in a rough manner. Then after learning a coarse plan of action, the system will drill down on smaller groups of muscles to learn a finer control policy, but with a greatly reduced search space of possible movements.
This technique was enabled through a process that represented both the robot and its environment as a two-dimensional action space. Motion was then simulated with the material-point-method, in which the action space is covered with points and overlaid with a grid. When assessing the success of an action, nearby points are more strongly correlated with one another. This helps the machine learning model to assess the state of the environment and assess what actions each segment of the robot should take.
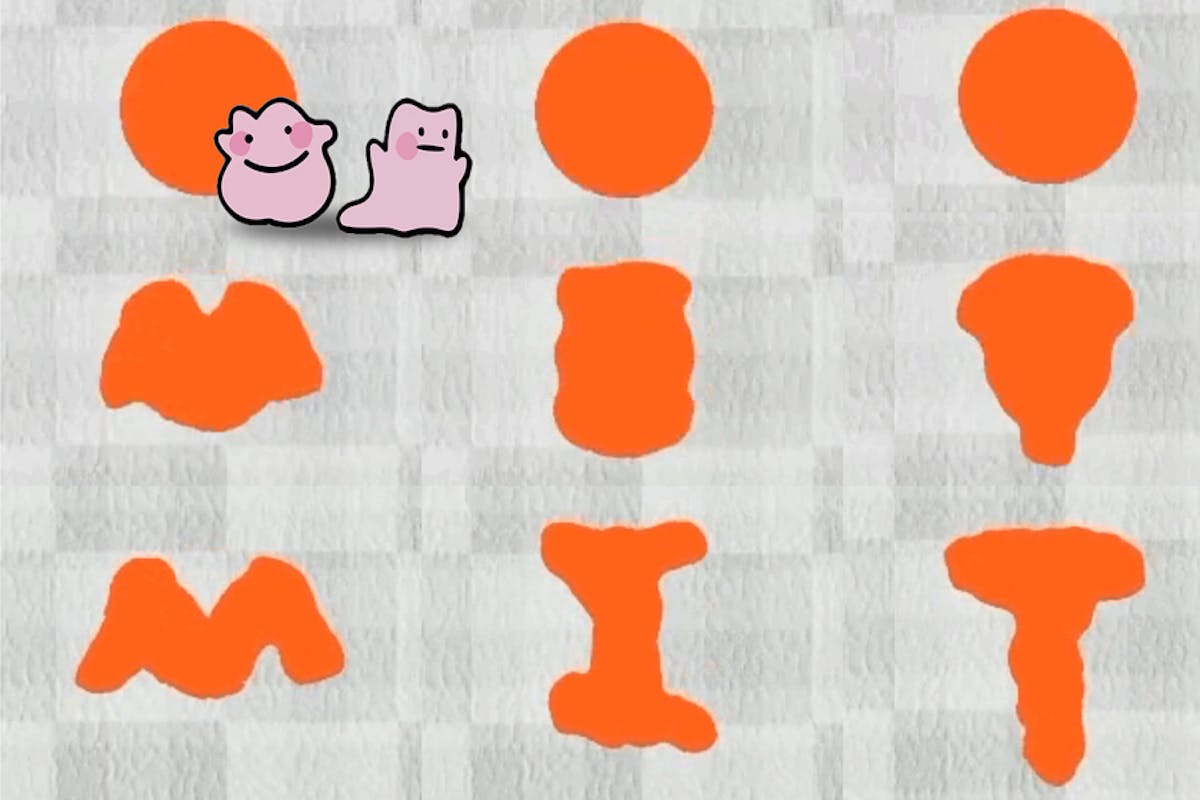
As previously mentioned, few actual, physical reconfigurable robots exist today, so the team developed a simulated environment called DittoGym. This system relies on a set of eight different tasks that test a robot’s ability to change shape and achieve a predefined goal. It was demonstrated how a robot could learn to, for example, stretch its body, or morph into the shape of a letter, to complete a task in DittoGym.
This new approach is a huge leap forward for reconfigurable soft robot control. Not only did it consistently outperform baseline methods, but where multistage tasks that require several shape changes are concerned, it proved to be the only suitable technique. Now, if only the hardware side of the equation would catch up to this advancement, reconfigurable robots might be able to step out of the research lab and into the real world.
R&D, creativity, and building the next big thing you never knew you wanted are my specialties.