Strength in Numbers
These programmable, ant-like microrobot swarms can lift objects thousands of times their own weight and climb over tall obstacles.


If you need a robot that is versatile enough to carry out just about any task you request of it, you will need to open up your wallet very wide. If that robot must also be fault tolerant, to prevent it from ever failing at any of those tasks, you might need to take out another mortgage on your home. And if that robot will need to lift thousands of times its own weight — well, just keep dreaming and wait for modern technology to catch up with your needs.
While this is a tall list of challenging requirements, they have already been met in the natural world. Consider ants, for example. Working by themselves they are very limited. But swarms of ants can team up to build bridges or make rafts. If a few of those ants fail in their job, there are many more right next to them picking up the slack. And it is well-known that ants can lift dozens of times their own body weight with ease.
How do we mimic these capabilities in artificial systems? A team led by researchers at Hanyang University in South Korea believe the answer involves swarms of tiny, ant-like programmable microrobots. They have shown that these swarms can work collectively to perform complex tasks, like transporting objects much larger and heavier than themselves and traversing challenging obstacles.
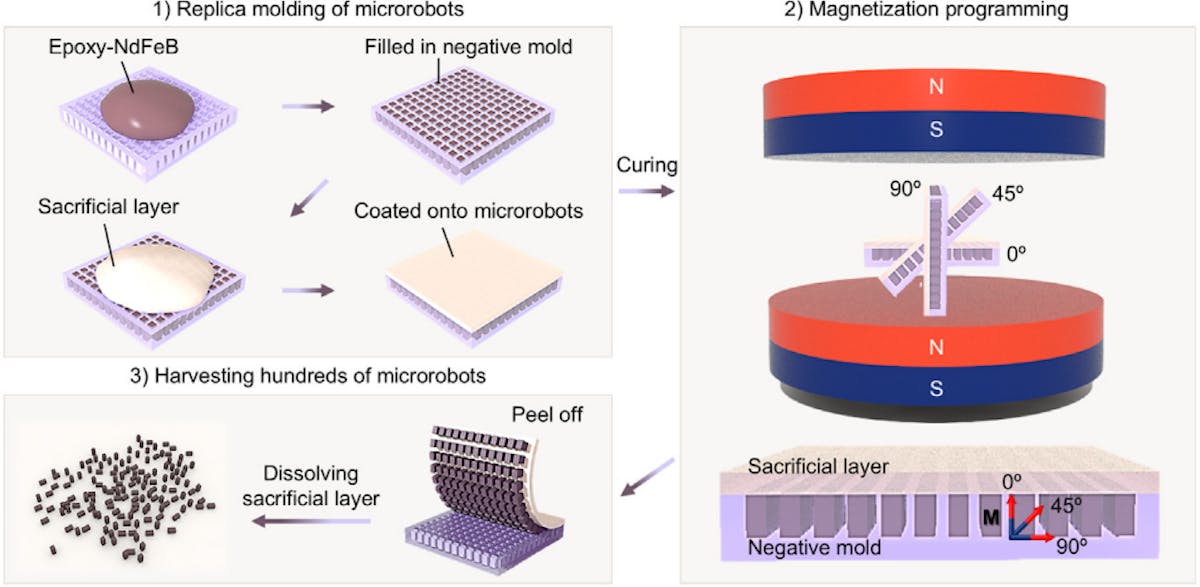
These cuboid-shaped microrobots are constructed using an epoxy, which minimizes the dissipation of elastic energy and increases the structural stiffness of assemblies of swarms of robots. Dispersed within the epoxy matrix are ferromagnetic neodymium-iron-boron microparticles, which are hard magnets capable of maintaining their programmed magnetization profiles even after external magnetic fields are removed. These magnetization profiles are crucial for enabling precise and stable magnetic interactions among the microrobots.
The profiles are established during the fabrication process by exposing the microrobots to external magnetic fields, which align the embedded magnetic microparticles in desired orientations. This programming enables directional magnetic interactions, allowing the robots to self-organize into deterministic assemblies. By varying the magnetization angles and patterns, researchers can control the robots’ configurations, such as forming high-aspect-ratio structures or densely packed arrangements.
This programmable magnetic behavior eliminates the need for onboard sensors or traditional wireless communication, relying instead solely on external magnetic fields to power, guide, and coordinate the microrobots’ movements and assembly patterns for specific tasks.
In a series of experiments, the robots demonstrated their ability to climb obstacles five times their body height and throw themselves over barriers. In another test, a large swarm formed a floating raft to transport a pill weighing 2,000 times the weight of an individual robot through liquid. On solid surfaces, swarms transported cargo 350 times heavier than a single microrobot. It was also demonstrated that they can unclog tube-like structures mimicking blocked blood vessels, which hints that the microrobots may one day serve in applications relevant to human health.
Future work will aim to develop real-time feedback control systems for precise motion and trajectory adjustments, allowing the robots to navigate complex and confined spaces autonomously. Additionally, the team intends to explore further advancements in magnetization techniques and swarm control strategies to improve the robots’ functionality and adaptability in a diverse range of environments.
R&D, creativity, and building the next big thing you never knew you wanted are my specialties.