



Hardware components | ||||||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 4 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
The purpose of this project was to find a way of controlling a telescope or camera for use with astrophotography. The software can be used with ALT/AZ or DEC/RA mounts.
The current project can be found at https://scopecontroller.weebly.com/. The website is constantly updated as improvements to the project are made.
Story line
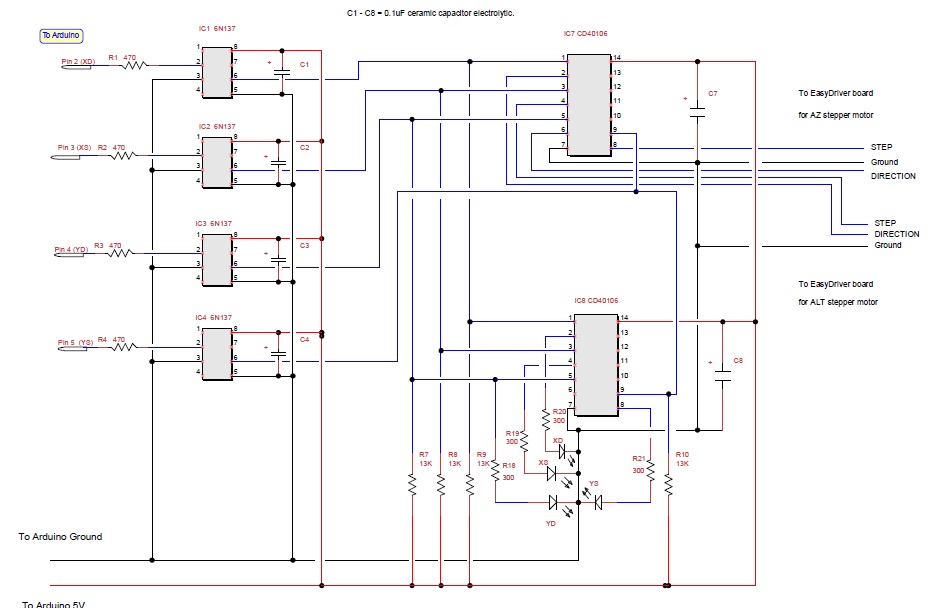
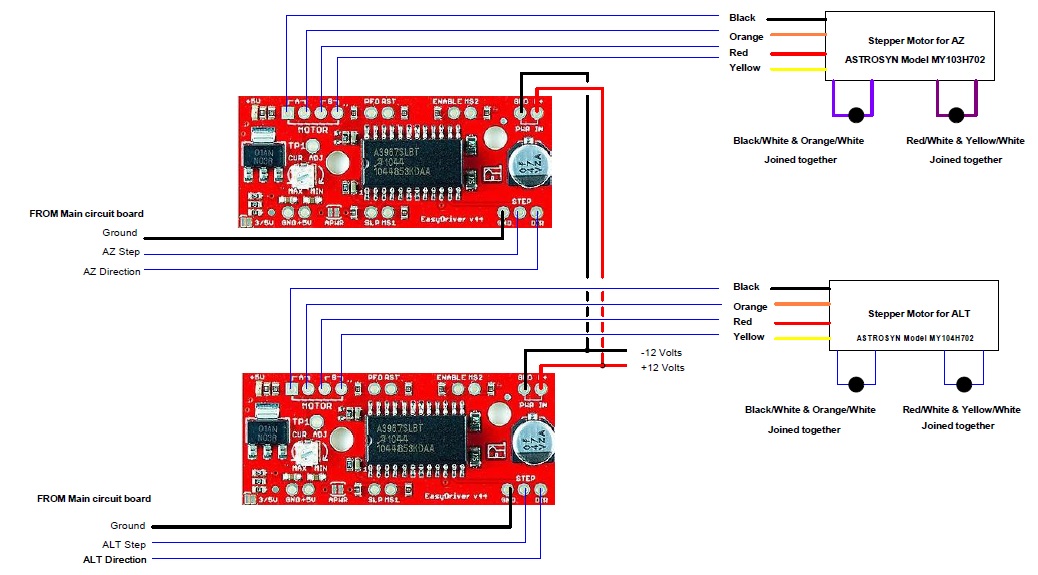
By utilising a PC-based program (written in Visual Basic 2010) that can give the current RA/DEC values for any celestial object, it should be a simple matter of automatically tracking that object. The PC can send stepping pulses to the telescope mount to keep the object tracked (after a few minutes of manual tracking for calibration).
After spending months searching for a similar set up without success I decided to design my own. The main advantages of this system is no requirement to "Polar Align" the scope when used in ALT/AZ mode. Other benefits are the ability to point the scope out of an open window whilst indoors in the warm, with access to power and services.
No more cold nights or dew forming on the lens.
By placing a webcam in the eyepiece and utilising capture software it is possible to take snapshots/ videos of the object. These can be enhanced by using Registax software to provide some decent images.
All the souce code and build details can be found on https://scopecontroller.weebly.com/
Please feel to use or modify the code for your set up, but not for financial gain.




{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.