



Hardware components | ||||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
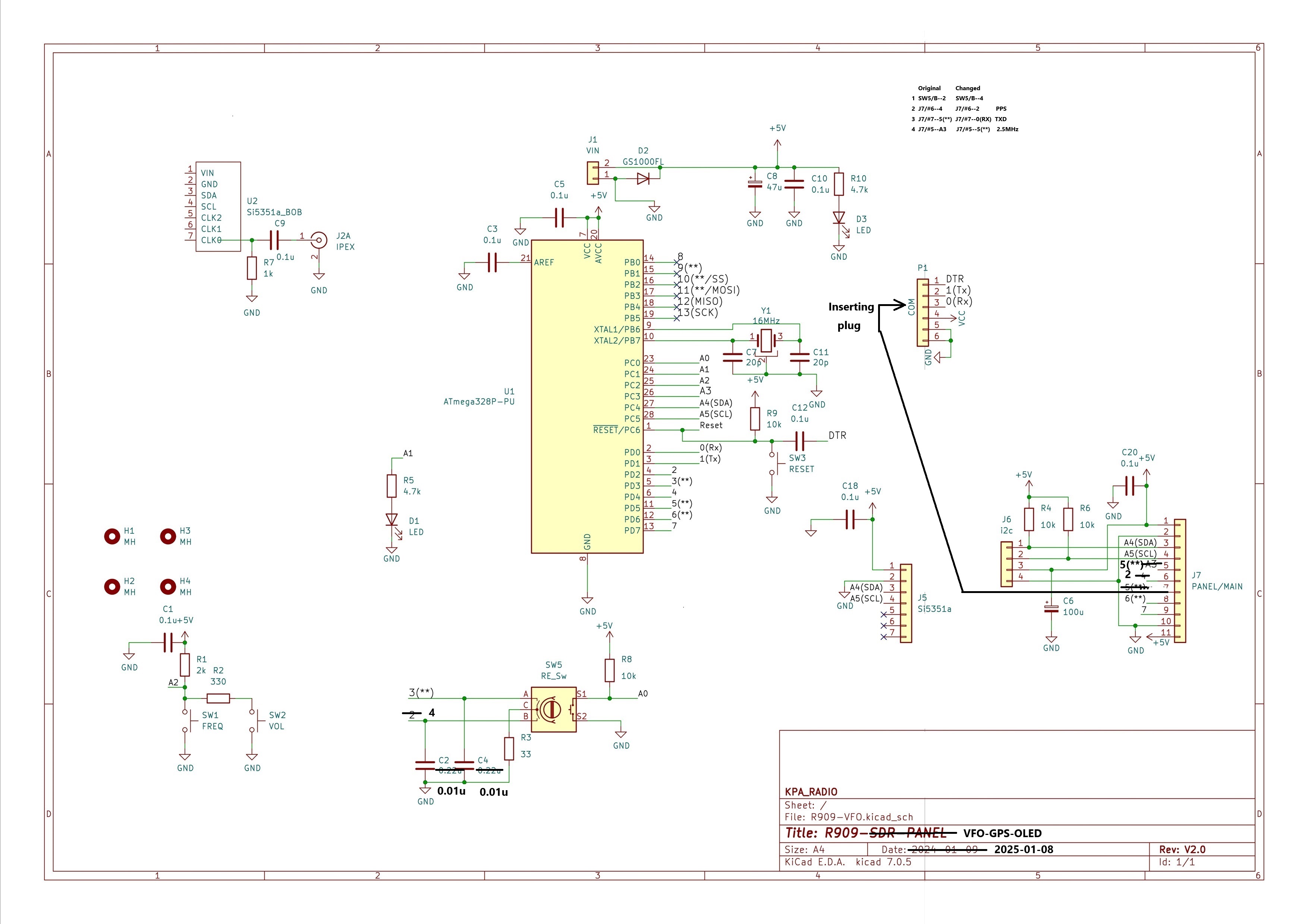
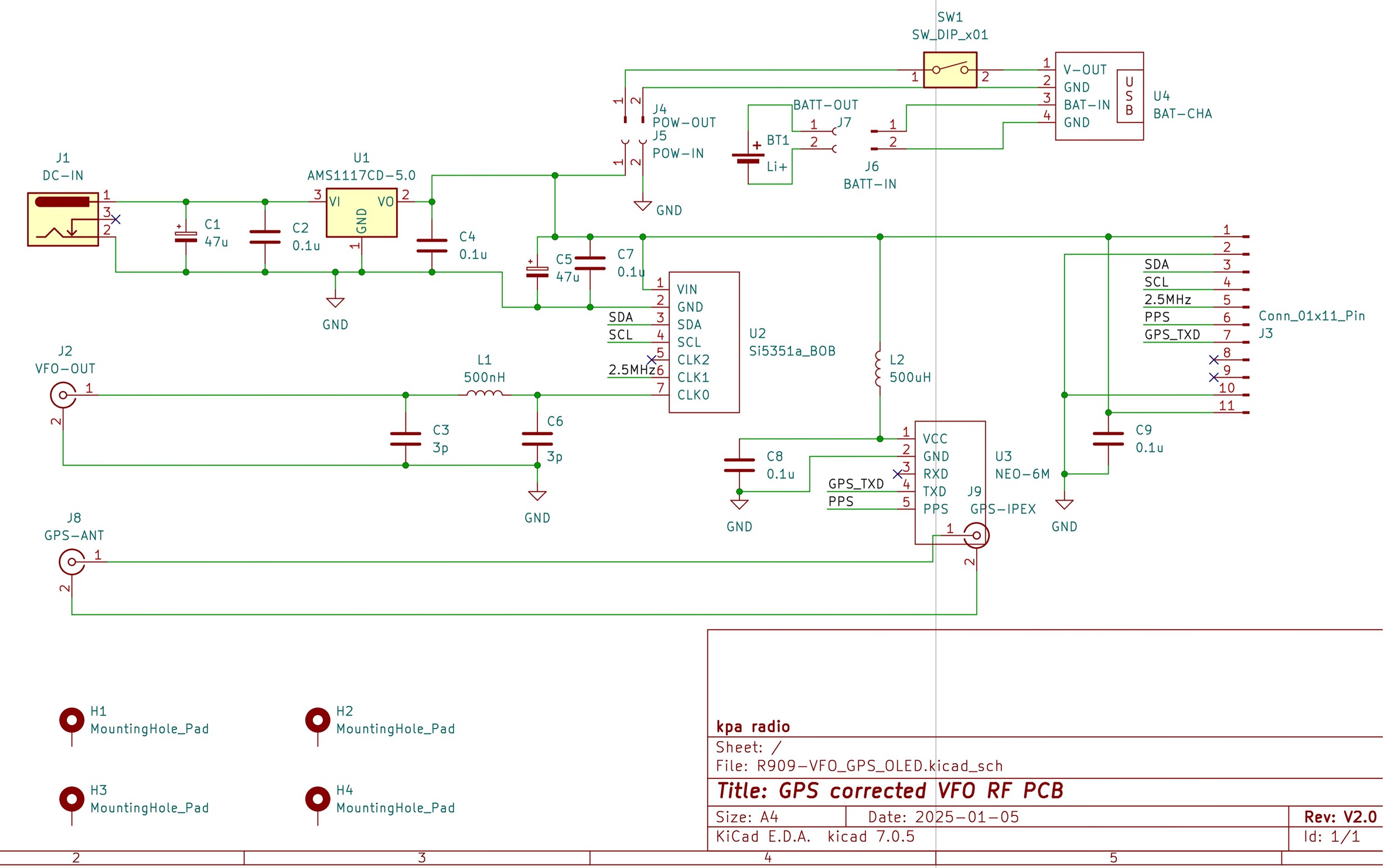
Si5351a is a great chip for making the accurate clock. But there is some frequency error because of its crystal oscillator circuit. To compare its frequency with GPS PPS, we can get the correction value as the difference between both. This frequency corrected value can be utilized for VFO correction.
Please look at inside of the case.
Please visit my blog to get how to make it.
https://blog.hatena.ne.jp/nobcha23/nobcha23.hatenablog.com/edit?entry=6802418398319296470
// 2025.01.07 pps OK, Sw1.2 OK 91%/62%
// 2024.12.09 tiny4kOLED
// 2024.11.16 Refered and Changed for R909-VFO-GPS
// added correction FREQ display
// changed store condition correction
// GITHUB https://github.com/Nobcha/R909-VFO-GPS
// D2:PPS,D5:2.5M,D7:EN,D0/RX:GPS/TX,LCD1602
//
// gps-calibration-5351
// https://github.com/csqwdy/gps-calibration-5351/blob/main/README.md
// 2022-03-06 Modified the encoder to work in signal change interrupt mode,
// Original was SQ1GU http://sq1gu.tobis.com.pl/en/dds
// include the library code:
#include <TinyGPS++.h>
// Change to OLED
#include <Tiny4kOLED.h>
#include <ctype.h>
#include <avr/interrupt.h>
#include <avr/io.h>
#include <Wire.h>
#include <si5351.h>
#include <EEPROMex.h>
// The TinyGPS++ object
TinyGPSPlus gps;
Si5351 si5351;
#define control 2 // 1=button ,2=EP11 ,3=EP12
// Set up MCU pins
#define GPS_Enable 7
#define ppsPin 2 // GPS-PPS INT
#define re_sw A0
#define encoderPinA 4 // Signal change INT
#define encoderPinB 3 //
#define ledPin A1
#define func_sw A2 // SW1:<80, SW2:<250,
#define Freq2 1000000000ULL
volatile byte seqA = 0;
volatile byte seqB = 0;
volatile byte cnt1 = 0;
volatile byte cnt2 = 0;
volatile boolean right = false;
volatile boolean left = false;
volatile boolean button = false;
// configure variables
unsigned long XtalFreq = 100000000;
unsigned long XtalFreq_old = 100000000;
long stab;
long correction = 0;
byte stab_count = 44;
unsigned long mult = 0, Freq = 10000000;
int second = 0, minute = 0, hour = 0;
int zone = 9;
unsigned int tcount = 0;
unsigned int tcount2 = 0;
int validGPSflag = false;
char c;
boolean newdata = false;
boolean GPSstatus = true;
byte new_freq = 1;
unsigned long freq_step = 1000;
byte encoderOLD, menu = 6, band = 1, f_step = 1;
boolean time_enable = true;
unsigned long pps_correct_time;
byte pps_valid = 0;
byte correct_byte = 1;
float stab_float;
unsigned long button_on_time;
boolean oled_turn = 1;
boolean vfo_counter = true; // true vfo
boolean new_c_freq = 0;
boolean pps_error = 1;
int func_sw_value;
// prototype
void PPSinterrupt(void);
void timezone_on_oled(void);
void stab_on_oled(void);
void correct_freq(void);
void corr_on_oled(void);
void freq2_on_oled(void);
void step_on_oled(void);
void band_on_oled(void);
void time_on_oled(void);
void sat_on_oled(void);
void freq_on_oled(unsigned long);
void update_si5351a(void);
void correct_si5351a(void);
static void GPSproces(unsigned long);
void change_up(void);
void change_down(void);
void loglat_on_oled(void);
void vfo_fr_oled (void);
void date_on_oled(void);
//*******************************************************************************
// Timer 1 overflow intrrupt vector. Count 2.5MHz
//*******************************************************************************
ISR(TIMER1_OVF_vect)
{
mult++; //Increment multiplier
TIFR1 = (1 << TOV1); //Clear overlow flag
}
//*********************************************************************
// Judge the rotating direction
// Signal change interrupt
//*********************************************************************
ISR (PCINT2_vect) {
// Read A and B signals
boolean A_val = digitalRead(encoderPinB);
boolean B_val = digitalRead(encoderPinA);
// Record the A and B signals in seperate sequences
seqA <<= 1;
seqA |= A_val;
seqB <<= 1;
seqB |= B_val;
// Mask the MSB four bits
seqA &= 0b00001111;
seqB &= 0b00001111;
// Compare the recorded sequence with the expected sequence
if (seqA == 0b00001001 && seqB == 0b00000011) {
cnt1++;
left = true;
}
if (seqA == 0b00000011 && seqB == 0b00001001) {
cnt2++;
right = true;
}
}
//*************************************************************************************
// SETUP
//*************************************************************************************
void setup()
{
pinMode(GPS_Enable, OUTPUT); // GPS-EN and LCD backlight on
digitalWrite(GPS_Enable, HIGH); //
pinMode(encoderPinA, INPUT); // Set up rotary encoder
digitalWrite(encoderPinA, HIGH);
pinMode(encoderPinB, INPUT);
digitalWrite(encoderPinB, HIGH);
pinMode(re_sw, INPUT); // Set up RE push buttons
digitalWrite(re_sw, HIGH);
pinMode(ledPin, OUTPUT); // Set up RE push buttons
digitalWrite(ledPin, LOW);
oled.begin();
oled.setFont(FONT6X8);
oled.clear();
oled.on();
delay(50);
// (PCINT19/OC2B/INT1) PD3, (PCINT20/XCK/T0) PD4
PCICR = 0b00000100; // PCIE0: Pin Change Interrupt Enable 0
PCMSK2 = 0b00011000; // Enable Pin Change Interrupt for D3, D4
TCCR1B = 0; // Disable Timer5 during setup
TCCR1A = 0; // Reset
TCNT1 = 0; // Reset counter to zero
TIFR1 = 1; // Reset overflow
TIMSK1 = 1; // Turn on overflow flag
pinMode(ppsPin, INPUT); // Inititalize GPS 1pps input
if (digitalRead(re_sw) == 0) { // EEPROM is initilised
oled.print("Initialization"); // by re_sw pushing on turning on
digitalWrite(ledPin, HIGH);
EEPROM.writeLong(1 * 4, 10000000);
EEPROM.writeLong(2 * 4, 16700000);
EEPROM.writeLong(3 * 4, 37200000);
EEPROM.writeLong(4 * 4, 64800000);
EEPROM.writeLong(5 * 4, 145000000);
EEPROM.writeByte(82, 1);
EEPROM.writeInt(80, 1);
EEPROM.writeLong(90, 0);
EEPROM.writeByte(99, 1);
delay(1000);
digitalWrite(ledPin, LOW);
}
band = EEPROM.readByte(82);
Freq = EEPROM.readLong(band * 4);
zone = EEPROM.readInt(80);
correct_byte = EEPROM.readByte(99);
correction = EEPROM.readLong(90);
si5351.init(SI5351_CRYSTAL_LOAD_8PF, 0, 0);
si5351.drive_strength(SI5351_CLK0, SI5351_DRIVE_8MA);
Serial.begin(9600); // To serve for the GPS module
// Set CLK0 to output 2,5MHz
si5351.set_ms_source(SI5351_CLK1, SI5351_PLLA);
si5351.set_freq(250000000ULL, SI5351_CLK1);
si5351.set_ms_source(SI5351_CLK0, SI5351_PLLB);
si5351.set_ms_source(SI5351_CLK2, SI5351_PLLB);
si5351.set_freq(Freq * SI5351_FREQ_MULT, SI5351_CLK0);
si5351.set_freq(Freq2, SI5351_CLK2);
correct_si5351a();
si5351.update_status();
oled.clear();
delay(100);
oled.setCursor(0, 0);
oled.print("GPS corrected VFO v1.2");
oled.setCursor(0, 1);
oled.print("5351a @ R909-VFO");
delay(2000);
oled.clear();
oled.setCursor(0, 1);
oled.print("Waiting for GPS");
GPSproces(3000);
if ( gps.charsProcessed() < 10) {
oled.clear();
delay(100);
oled.setCursor(0, 0);
oled.print("No GPS connected");
oled.setCursor(0, 1);
oled.print (" check wiring!! ");
GPSstatus = false; // OK
pps_error = 0;
}
delay(2000);
// if GPS connected then...
if (GPSstatus == true) {
oled.setCursor(0, 1);
oled.print("Waiting for SAT");
delay(100);
time_on_oled();
sat_on_oled();
// Go out when !SAT(0) or RE-SW/on
do {
GPSproces(1000);
} while ((gps.satellites.value() == 0)&(digitalRead(re_sw) == 1 ));
hour = (gps.time.hour() + zone) % 24; // JPN: zone#9
minute = gps.time.minute();
second = gps.time.second();
time_on_oled();
sat_on_oled();
attachInterrupt(0, PPSinterrupt, RISING);
TCCR1B = 0;
tcount = 0;
mult = 0;
validGPSflag = 1;
}
oled.clear();
delay(50);
vfo_fr_oled ();
sat_on_oled();
time_on_oled();
loglat_on_oled();
delay(500);
oled_turn = 1;
}
//***************************************************************************************
// LOOP
//***************************************************************************************
void loop()
{
if (tcount2 != tcount) { // PPS 1 sec check
tcount2 = tcount; // L#202
pps_correct_time = millis(); // Watching PPS period as 1 sec
}
if (tcount < 4 ) { // warm up up to 4
GPSproces(0); // get GPS data
}
else digitalWrite(ledPin, tcount%2 | pps_error);
if (gps.time.isUpdated()) {
hour = ((gps.time.hour() + zone)) % 24;
if(hour<0) hour = hour * -1;
minute = gps.time.minute();
second = gps.time.second();
time_on_oled();
loglat_on_oled();
}
if (gps.satellites.isUpdated() && menu == 0) {
sat_on_oled();
}
if (new_freq == 1) { // After correcting FREQ, display * @(15,0)
correct_si5351a();
new_freq = 0;
// oled.setCursor(120, 0);
// oled.print("*");
}
/* if (new_freq != 1) { // No correcting FREQ, display * @(15,0)
oled.setCursor(120, 0);
oled.print(" ");
}
*/
if (new_freq == 2) { // After setting new FREQ by rotating
update_si5351a();
vfo_fr_oled();
new_freq = 0;
}
if (digitalRead(re_sw) == 0 ){ //re_sw pressed?
button = true; // re_sw press
button_on_time = millis(); // Time to avoid chattering
}
if (button == true && (button_on_time + 200) < millis() ) { // re_sw settled
menu++;
if (menu > 6 ) menu = 1; // increase menu 6 of correction
switch (menu) {
case 0:
sat_on_oled();
time_on_oled();
time_enable = true;
break;
case 1:
band_on_oled();
break;
case 2:
step_on_oled();
break;
case 3:
vfo_fr_oled();
freq2_on_oled();
break;
case 5:
EEPROM.writeLong(band * 4, Freq);
stab_on_oled();
break;
case 4:
timezone_on_oled();
break;
case 6: // added new menu
corr_on_oled(); // display correction value
break;
}
button = false ;
}
if(pps_error == 1){
oled.setCursor (112, 0);
oled.print("?"); // Ararming PPS is out of order
}
if (millis() > pps_correct_time + 1200) { // pps timing is out of order
pps_valid = 0;
pps_correct_time = millis();
time_enable = false;
oled.setCursor (112, 0);
oled.print("?"); // Ararming PPS is out of order
}
else {
oled.setCursor (112, 0);
oled.print("!");
}
// Encoder responce on signal changing interrupt
if (left) {
left = false;
change_down();
// oled.setCursor (112, 1);
// oled.print(cnt1%10);
}
if (right) {
right = false;
change_up();
// oled.setCursor (118, 1);
// oled.print(cnt2%10);
}
// SW1:<80, SW2:<250 (actual 0, 166)
// This set keeps 2 keys of SW1 & SW2
func_sw_value = analogRead(func_sw);
if (func_sw_value < 100 ) { // SW2:menu=2/step
menu = 2;
step_on_oled();
}
else if (func_sw_value < 300 ) { // SW1:menu=3/frequncy,
menu = 3;
vfo_fr_oled();
freq2_on_oled();
}
oled.setCursor (108, 3);
if (menu > 4) {
oled.print(mult%10);
oled.print(tcount%100);
oled.print(" ");
}
else oled.print(" ");
}
//**************************************************************************************
// INTERRUPT 1PPS
//**************************************************************************************
void PPSinterrupt()
{
tcount++;
stab_count--;
if (tcount == 4) // Start counting the 2.5 MHz signal from Si5351A CLK0
{
TCCR1B = 7; //Clock on rising edge of pin 5
}
if (tcount == 44) //The 40 second gate time elapsed - stop counting
{
TCCR1B = 0; //Turn off counter
if (pps_valid == 1) {
XtalFreq_old = XtalFreq;
XtalFreq = mult * 0x10000 + TCNT1; //Calculate correction factor
new_freq = 1;
}
TCNT1 = 0; //Reset count to zero
mult = 0;
tcount = 0; //Reset the seconds counter
pps_valid = 1; // Keeping 1 sec cycle time
stab_count = 44;
if((XtalFreq_old - XtalFreq)<1000000 | (XtalFreq - XtalFreq_old)<1000000 )
{
correct_freq();
pps_error = 0;
}
else pps_error = 1;
}
}
//********************************************************************************
// TIMEZONE on OLED <>
//********************************************************************************
void timezone_on_oled()
{
time_enable = false;
oled.setCursor(0, 1);
oled.print("TIME zone ");
if (zone > 0) oled.print("+");
oled.print(zone);
oled.print(" < > ");
}
//********************************************************************************
// STAB on OLED stability index
//********************************************************************************
void stab_on_oled() {
oled.setCursor(56, 1);
oled.print(" ");
oled.setCursor(0, 1);
oled.print("Fstab ");
oled.print(stab_float);
oled.print("Hz ");
}
//********************************************************************************
// correct ferquency Crystal is 25MHz,
//********************************************************************************
void correct_freq()
{
long pomocna;
time_enable = false;
stab = XtalFreq - 100000000; // measured value was 100MHz
stab = stab * 10 ; //
if (stab > 100 || stab < -100) {
correction = correction + stab;
}
else if (stab > 20 || stab < -20) {
correction = correction + stab / 2;
}
else correction = correction + stab / 4;
if(stab < 20 || stab > -20) {
if(correct_byte != 0){
EEPROM.writeLong(90, correction);
EEPROM.writeByte(99, 0);
}
}
pomocna = (10000 / (Freq / 1000000));
stab = stab * 100;
stab = stab / pomocna;
stab_float = float(stab);
stab_float = stab_float / 10;
}
//********************************************************************************
// corr_on_OLED
//********************************************************************************
void corr_on_oled() // Display correction frequency
{
oled.setCursor(0, 1);
oled.print("CORR=");
oled.print(correction/100); // Freq is xxxxULL
oled.print(".");
oled.print(correction%100);
oled.print("Hz ");
}
//********************************************************************************
// FREQ_2 on OLED <>
//********************************************************************************
void freq2_on_oled()
{
time_enable = false;
oled.setCursor(0, 1);
oled.print("FREQ Bank ");
oled.print(band);
oled.print(" < > ");
}
//********************************************************************************
// STEP on OLED
//********************************************************************************
void step_on_oled()
{
time_enable = false;
oled.setCursor(0, 1);
oled.print("STEP ");
switch (f_step) {
case 1: freq_step = 1, oled.print(" 1Hz");
break;
case 2: freq_step = 10, oled.print(" 10Hz");
break;
case 3: freq_step = 100, oled.print(" 100Hz");
break;
case 4: freq_step = 1000, oled.print(" 1kHz");
break;
case 5: freq_step = 10000, oled.print(" 10kHz");
break;
case 6: freq_step = 100000, oled.print("100kHz");
break;
case 7: freq_step = 1000000 , oled.print(" 1MHz");
break;
case 8: freq_step = 10000000, oled.print(" 10Mhz");
break;
}
}
//********************************************************************************
// BAND on OLED
//********************************************************************************
void band_on_oled()
{
time_enable = false;
oled.setCursor(0, 1);
oled.print("BANK ");
oled.print(band);
oled.print(" < > ");
Freq = EEPROM.readLong(band * 4);
freq_on_oled(Freq);
update_si5351a();
}
//********************************************************************************
// TIME on OLED
//********************************************************************************
void time_on_oled()
{
char sz[32];
sprintf(sz, "%02d:%02d:%02d ", hour, minute, second);
oled.setCursor(56, 2);
oled.print(" ");
oled.print(sz);
}
//********************************************************************************
// SAT number on OLED
//********************************************************************************
void sat_on_oled()
{
time_enable = false;
int sat_num = gps.satellites.value();
oled.setCursor(0, 2);
oled.print("SAT ");
oled.print(sat_num);
oled.print(" ");
time_enable = true;
}
//********************************************************************************
// Latitude & longtitude on oled
//********************************************************************************
void loglat_on_oled()
{
oled.setCursor(0, 3);
oled.print("LAT"+String(gps.location.lat(),2));
oled.print(" LON"+String(gps.location.lng(),2));
}
//*********************************************************************************
// Freq on OLED
//*********************************************************************************
void freq_on_oled(unsigned long freq_disp) {
char buf[10];
// Print frequency to the LCD
ltoa(Freq, buf, 10);
time_enable = false;
oled.setCursor(24, 0);
delay(10);
// Print frequency to the oled
ltoa(freq_disp, buf, 10);
time_enable = false;
if (Freq < 1000000)
{
oled.print(" ");
oled.print(" ");
oled.print(" ");
oled.print(" ");
oled.print(buf[0]);
oled.print(buf[1]);
oled.print(buf[2]);
oled.print('.');
oled.print(buf[3]);
oled.print(buf[4]);
oled.print(buf[5]);
}
if (Freq >= 1000000 && Freq < 10000000)
{
oled.print(" ");
oled.print(" ");
oled.print(buf[0]);
oled.print(',');
oled.print(buf[1]);
oled.print(buf[2]);
oled.print(buf[3]);
oled.print('.');
oled.print(buf[4]);
oled.print(buf[5]);
oled.print(buf[6]);
}
if (Freq >= 10000000 && Freq < 100000000)
{
oled.print(" ");
oled.print(buf[0]);
oled.print(buf[1]);
oled.print(',');
oled.print(buf[2]);
oled.print(buf[3]);
oled.print(buf[4]);
oled.print('.');
oled.print(buf[5]);
oled.print(buf[6]);
oled.print(buf[7]);
}
if (Freq >= 100000000)
{
oled.print(buf[0]);
oled.print(buf[1]);
oled.print(buf[2]);
oled.print(',');
oled.print(buf[3]);
oled.print(buf[4]);
oled.print(buf[5]);
oled.print('.');
oled.print(buf[6]);
oled.print(buf[7]);
oled.print(buf[8]);
}
oled.print("kHz");
}
//********************************************************************
// VFO frequency
//********************************************************************
void vfo_fr_oled ()
{
oled.setCursor(0, 0);
delay(10);
oled.print("VFO:");
freq_on_oled(Freq);
}
//********************************************************************
// NEW frequency
//********************************************************************
void update_si5351a()
{
si5351.set_freq(Freq * SI5351_FREQ_MULT, SI5351_CLK0);
}
//********************************************************************
// Frequency correction
//********************************************************************
void correct_si5351a()
{
si5351.set_correction(correction, SI5351_PLL_INPUT_XO);
//update_si5351a();
}
//*********************************************************************
// Get data from GPS
//**********************************************************************
static void GPSproces(unsigned long ms)
{
unsigned long start = millis();
do
{
while (Serial.available())
gps.encode(Serial.read());
} while ((millis() - start ) < ms);
}
//**************************************************************************************
// Clockwise by rotary encoder
//**************************************************************************************
void change_up(){
switch (menu) {
case 1: {
band++;
if (band > 5) band = 5;
EEPROM.writeByte(82, band);
band_on_oled();
}
break;
case 2: {
f_step++;
if (f_step > 8)f_step = 8;
step_on_oled();
}
break;
case 3: {
Freq += freq_step;
if (Freq > 200000000) Freq -= freq_step;
new_freq = 2;
}
break;
case 4: {
zone++;
if (zone > 12)zone = 12;
EEPROM.writeInt(80, zone);
timezone_on_oled();
}
break;
case 6: {
EEPROM.writeLong(90, correction);
EEPROM.writeByte(99, 0);
}
break;
}
}
//**************************************************************************************
// Counterclockwise by rotary encoder
//**************************************************************************************
void change_down(){
switch (menu) {
case 1: {
band--;
if (band == 0) band = 1;
EEPROM.writeByte(82, band);
band_on_oled();
}
break;
case 2: {
f_step--;
if (f_step == 0 )f_step = 1;
step_on_oled();
}
break;
case 3: {
Freq -= freq_step;
if (Freq > 200000000 || Freq < 1000) Freq += freq_step;
new_freq = 2;
}
break;
case 4: {
zone--;
if (zone < -12)zone = -12;
EEPROM.writeInt(80, zone);
timezone_on_oled();
}
break;
}
}

{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.