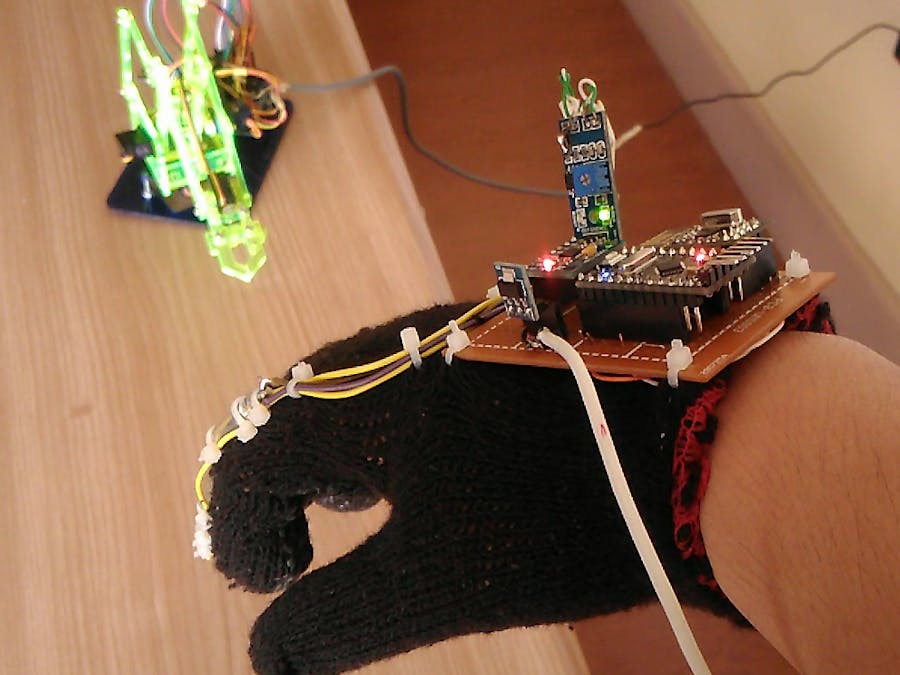
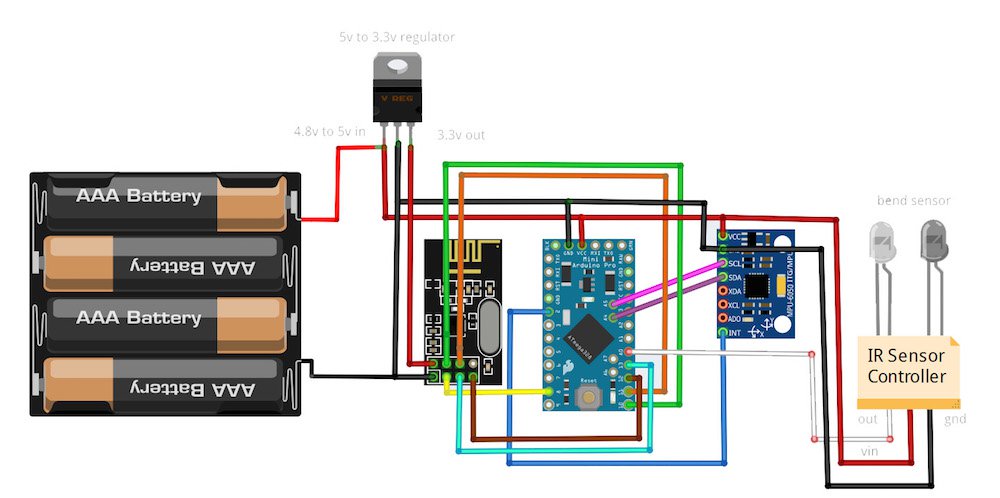
A transmitter circuit, powered by an nRF24L01 breakout board and Arduino Pro Mini, is attached to a glove. The circuit also contains an IMU and flex sensor.
For this project, a DIY flex sensor was used:
The flex sensor contains a light transmitter and a receiver in both ends of the tube. When the tube is bent, the light receiver receives less light, thereby detecting the bend.
The MPU6050 IMU detects wrist rotation. The movements are detected and sent to the receiving circuit through the nRF24L01 transceiver.
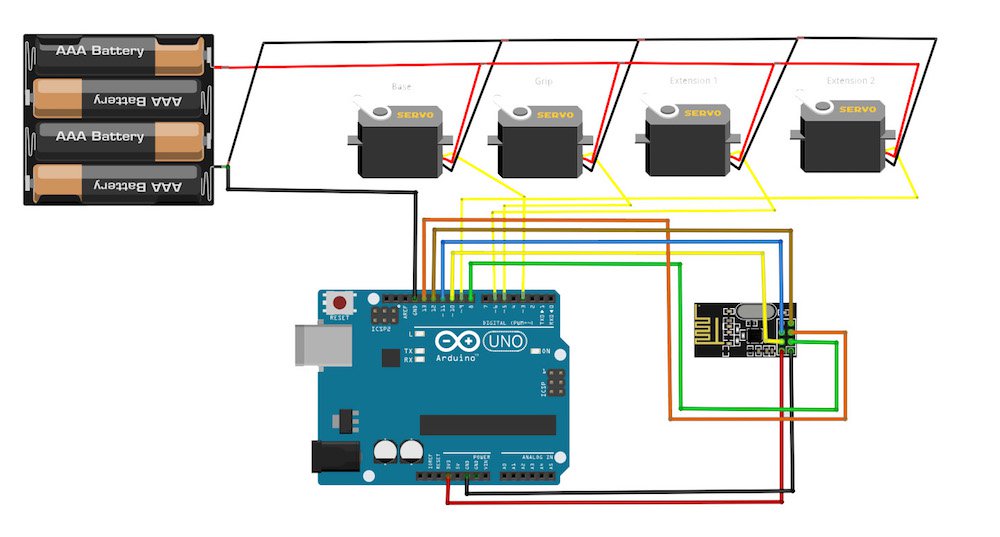
The receiver circuit decodes the data coming from the transmitter and moves the four-servo robotic arm accordingly. The robotic arm used is the one from MeArm.


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
{kind=link}
Comments