The robot is driven my two modified servos with an offset to create overlapping circles that are spaced out by a couple millimeters. Using the lasercutting machines in Jacobs, I built the body and the wheels (wheels have rubber bands for extra traction.) For some reason, the bot sporadically changes the speed of rotation. I believe that it is due to the low 9V voltage of the battery pack since the bot rotates at the desired speed when connected through the USB cable.
To make continuous servos, I had to remove the mechanical block (the pin.)
...and the electrical block (already removed)..
...which is a potentiometer. I soldered two resistors connected to absorb the voltage previously sent to the potentiometer (about 5k Ohms.)
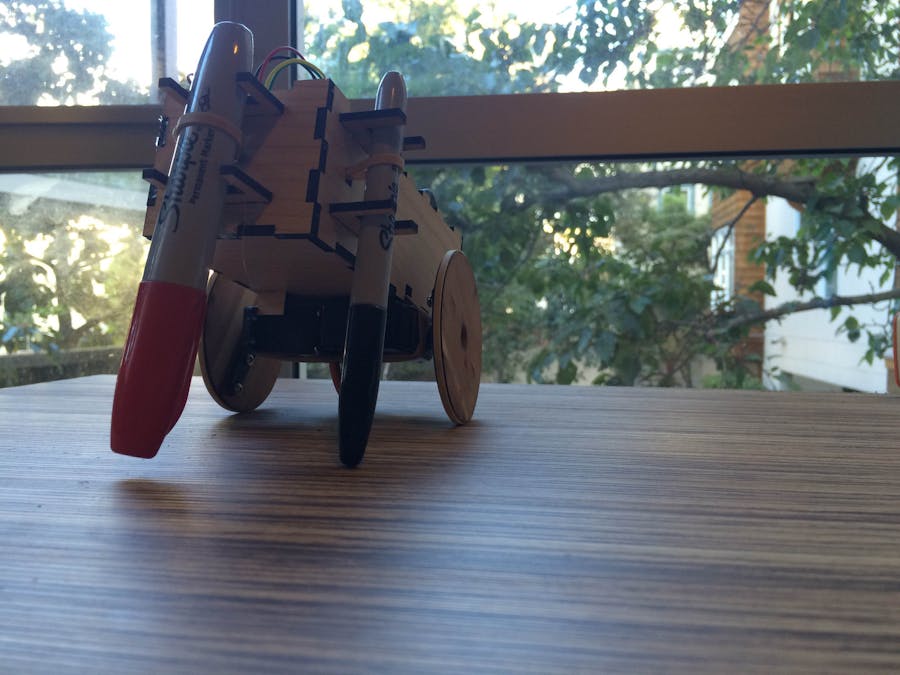
THE FRAME: Made of MDF wood covered with veneer with stabilizers for the sharpies.
The sharpies are held by the same rubber band. Also, one of the "tires" can be seen.
Due to changes in speed, the path gets ruined. The best performance is behind the robot. The code is at the bottom.
For the DrawBot's body, I used makercase.com and modified the file for needed support and holes.
ARDUINO SHIELD
The shield was relatively simple to make. I tested out the connections before on the solderless breadboard.




Comments
Please log in or sign up to comment.