


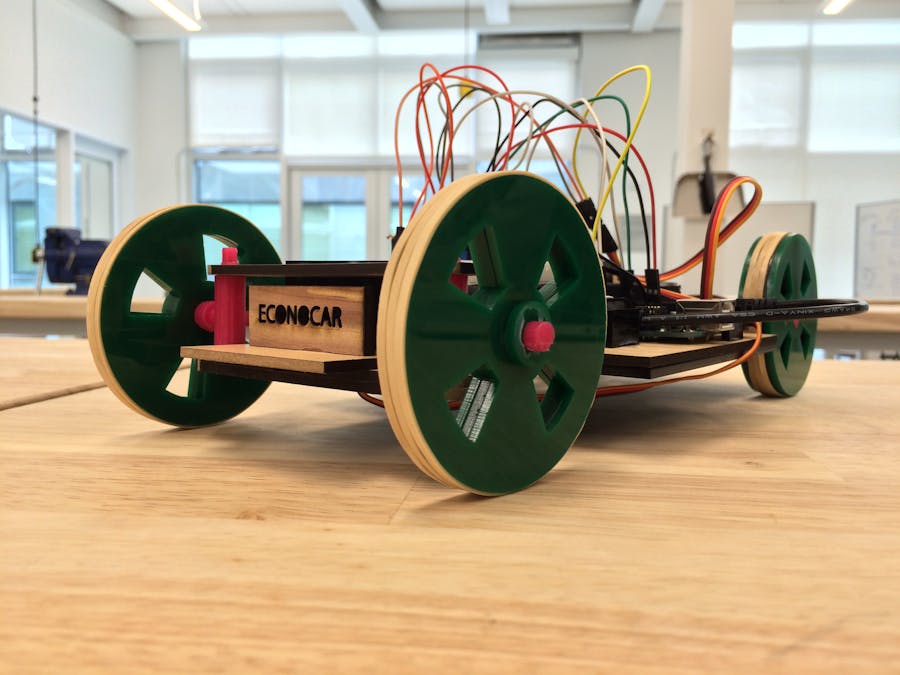
ECONOCAR
I had some left over materials from previous projects and wanted to build an RC car that resembles the operation of modern cars at its simplest form. I decided that it would be the most effective to 3D print the rear axle and the steering knuckles because of the need for a precise combination of geometric shapes. Everything else, as I envisioned, could be properly manufactured through laser cut parts.
Material List
-Arduino Uno
-MDF wood
-Acrylic
-self-modded continuous TowardPro servo
-musical wire
-micro servo
Concept:
STEERING SYSTEM
The steering system is powered by a servo that is connected to two 3D printed steering knuckles with custom bent musical wires. The knuckles feature an axle that allow free spin of the wheel. The use of one servo that would simultaneously turn both wheels was most economical and efficient due to my experience in building RC planes.
DRIVETRAIN
For the drive train, I used a modded servo as my motor since it could rotate back and forth perfectly while connected to a potentiometer and I didn't want to spend money on a DC motor. I laser cut a custom-made gear I made a couple weeks back to turn the 3D printed axle.
FINAL ASSEMBLY
After having all the parts working the way I wanted them to, I laser cut the chassis frame and put it all together.
For the remote control wiring, I cut open an ethernet cable and took out the 8 individual strand wires.
and voila... the car in action doing a 3-point turn.

Comments