



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Smart Home Assist is a system created to empower individuals with physical disabilities by giving them the ability to control home devices independently. The inspiration for this project emerged from my research into the lives of disabled individuals. A common theme I discovered was the strong desire to reduce dependence on others for daily tasks.
During my research, I came across a video of a man with paraplegia who had lost the use of his fingers. In the video, he demonstrated how he navigated his phone despite his condition. This struck a chord with me and motivated me to develop a device that could make using a phone easier for him and others in similar circumstances.
The result was the Air Clicker—a wearable mouse that fits like a glove. The mouse pointer moves in the direction your hand is oriented, and clicking is achieved through voice commands. This device can be connected to a PC, mobile phone, or tablet via USB, extending its usability across multiple platforms.
Addressing the issue of dependence, the Air Clicker simplifies the interaction with phones and PCs, which, in turn, facilitates the control of smart home devices through these interfaces. This innovation can help disabled individuals perform tasks independently, such as seeing who is at the door, unlocking it, or turning appliances on and off.
Building on this concept, I expanded the project to include a complete smart home system, aptly named Smart Home Assist. The system comprises three main components in addition to the Air Clicker:
Door Cam: A doorbell camera that captures an image when the button is pressed and sends it to the homeowner.
Relay Controller: A device that manages various home appliances and electronics, such as light bulbs and fans.
UniHiker Dashboard: A user interface for the smart home system, allowing users to control devices and view images from the camera.
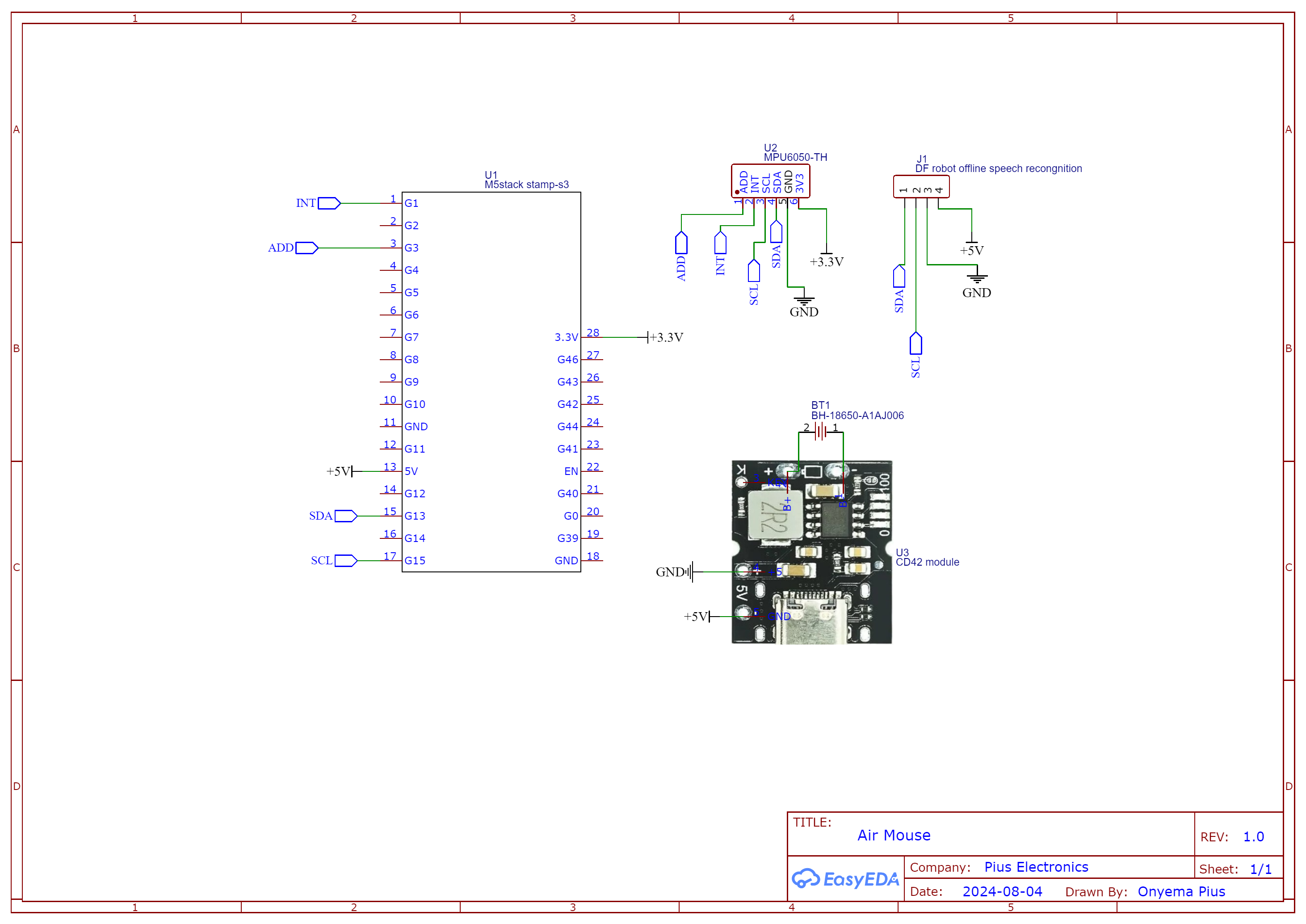
Air ClickerTo build the air clicker make your connections according to the schematic diagram below:
I have provided two schematics one for the ESP32-S3-WROOM-1 N8R2
and another one using the Xiao ESP32 S3.
After building the circuit, glue it onto a glove like in the image below.
Using the Air Clicker
To use the Air Clicker, plug it into your PC, smartphone or the unihiker, and plug in the other end of the cable to the USB port of the ESP32S3.
Now when the Air clicker is plugged into your PC, the built-in RGB LED of the ESP32-S3-WROOM-1 N8R2 should show red, after a while it shows green. What do these colours mean?
Red: This means the mouse is calculating its offset, so your hand should be in a rest position. This position will be used to know when the mouse is stationary.
Green: The mouse is ready to be used.
Tilt your hand in the direction you want the mouse pointer to move, you should see the mouse move in that direction.
For clicking, voice commands will be used. We will be using the dfrobot offline voice recognition module, but we must teach the module some command words first. The teaching process is explained in detail, in the YouTube video below.
Relay ControllerThe relay controller is made of 8 relays that are controlled by an ESP32 controller. The ESP32 receives commands from the unihiker via HTTP request and based on the command turns on a particular relay, which in turn drives an AC load. For the relay controller, I used a 16-channel relay shield but only used 8 relays.
The connection between the relay shield and the esp32 is expressed in the image below.
The code
The code for the relay controller is fairly simple. You can find the code in my GitHub repository in the directory ESP32_Relay_Controller.
The ESP32 used here is the ESP32 Wroom Devkit, so when uploading your code select ESP32 Wroom as your board when uploading code using the Arduino IDE.
UnihikerThe UniHiker serves as the hub of the Smart Home system, running a Flask server that manages the entire setup. Each device within the system receives commands from or sends data to the UniHiker. The Smart Home system is built on a server-client architecture, with the UniHiker functioning as the central server and all connected devices, like the Door Cam and relay controller, operating as clients. These clients communicate with the UniHiker via Wi-Fi.
The Code
The code performs three key functions:
- Runs a Flask server.
- Receives images from the Door Cam.
- Sends commands to the Relay Controller.
First, we import all libraries
Next, we initialize the UniHiker board, enabling the use of its IO pins. We also instantiate the UniHiker GUI class, which will be essential for creating buttons in the interface.
The Relay Controller is managed by an ESP32, which receives commands from the UniHiker. For this setup to work, the UniHiker needs to be aware of the IP address of the ESP32 and the specific route (`/pin`) where commands should be sent. Make sure to replace the IP address in the code with the IP address of your ESP32.
To create a button, I used an image with an `onclick` event. However, I needed to store information about the button's state—whether it is on or off—as well as its position, name, and other relevant details. To manage this, I created a data class called `Button`.built-in
When the button is pressed, the image of the button changes depending on its previous state and a request is sent to the relay controller. The function below handles this functionality.
Whenever an image is sent via the Door Cam, the built-in buzzer in the UniHiker emits a sound. To achieve this, we need to create a tone object using the buzzer pin Pin.P26 and set the tone frequency we want to play.
As mentioned earlier, the buttons are represented as images. To display them, we need to create an object of the `Button` data class that we created. This data class is also responsible for drawing the button's image using the `gui.draw_image()` function.
Next, we need to reserve space for displaying the image sent by the Door Cam. We'll do this by placing a sample image in the designated area. When an image arrives from the Door Cam, it will replace the sample image.
Then, we create a flask app
When the Door Cam sends an image to the unihiker, it is stored in a folder called upload. We create this folder via the code below:
To upload an image to the Unihiker via the Flask server, we will create a form that allows us to upload a file. This is done via the code below:
The ESP32 Door Cam will take advantage of this form when uploading images. Pay attention to the `name` attribute in the input tag, which is set to 'file'. This name must also match the corresponding variable in the ESP32 Door Cam code. While I've already set this up, be sure to maintain this consistency if you plan to modify the code.
The remainder of the code handles receiving the image from the Door Cam, displaying it on the screen, and sounding the buzzer as a notification. You can find the full code in my GitHub repository here.
Door CamThe Door Cam is a doorbell with a camera, I used the M5 stack ESP32 Camera and M5 stack dual button unit. Whenever the red button is pressed an Image is taken and sent to the unihiker display to be seen by the user who is notified by Unihiker's in-built buzzer. To build this, connect the dual button to the HY2.0-4P I2C port of the ESP32 camera. Do note that the buttons do not use I2C we are just using the I2C pins as input pins for our button.
Adding an Indicator LED
The M5stack esp32 camera does not have external GPIOs so we will hack the M5 dual button and use one of the button's GPIO as our LED.
- First, open the M5 stack dual-button
- Attach a 270 ohms resistor to the anode of the LED
- solder the cathode to the pin labelled A on the button's PCB and the solder anode to the pin labelled 5 behind the PCB
How to setup
By now you should have downloaded or cloned the GitHub repository for this project, open the folder Door cam.
upload the DoorCam.ino file to the camera. Do note the board type is M5unitCAM
Before uploading the code, update the following variables:
You should not need to edit the server port, because I have already hardcoded it on the Unihiker to be 5001, but you do need to put in the IP address of the Unihiker.
When the code has uploaded, open the serial monitor and set its baud rate to 115200 you should see a message similar to this:
This above output will show on the serial monitor if the esp32 has no previously saved network or failed to connect to one, then a web portal will be created at the IP address shown on the screen.
open your phone or PC wifi setting and connect to WiFi network named Door-cam.
immediately you are connected to the device your browser should automatically pop up and open the web address if it doesn't, type in the IP address on the serial monitor in your browser. You should see the screen below:
click on Configure WiFi, select your router, input its password and click Save.
When connected you should see the image below on your serial monitor
Immediately the camera will start trying to initialize a connection with the server.
The server here is the Unihiker running a flask server. The unihiker has to be on, connected to the same WiFi network as the camera and currently running the server otherwise the camera won't be able to initialize a connection to it.
Press the red button, and you should see the following on the serial monitor:
You should also see an image appear on the unihiker screen
DebuggingCamera Issues
If the LED is not coming on, it means there is an issue connecting with the server. it could be one of the following:
- The camera is not on the same wifi network as the server
- The server is not running
- The router that is used to create the network is not ON or not available
- The camera is having issues connecting to the router
If the LED is on and images are not sent to the unihiker; then, there is an issue with the camera. The issue could be any of the following:
- You are not using the same camera model as me
- if you used the same camera as me, you probably chose the wrong board in board options. The board should be M5unitcam.
If you do plan to use a different ESP32 camera model, go to Arduino Examples > ESP32 > Camera. You should see all board models in the CameraWebServer.ino file
go to camera_pins.h and copy the pins for your camera model
and replace it with the pins in the Door cam.ino code
- if you used the same camera as me, you probably chose the wrong board in board options. The board should be M5unitcam
Static IP configurationDue to the DHCP server on my router, IP addresses change occasionally and are only reserved for a fixed period, so whenever the IP address changes the codes have to be updated.
To remedy this you can enable Static IP configurations on your router. To do this you would need the MAC address of each of the devices in our smart home system that are connected to the router.
IP addresses for connected devices are typically assigned based on various factors, but we can skip that by simply assigning the same IP addresses that were initially given out via DHCP. By configuring the router to use static IP settings, we can ensure that each device retains its original IP address every time it connects to the router.
Your router UI would probably be different than mine. You just have to go through the various options in your router to find static IP, then you just need to input the device MAC address and then the static IP you want it to have.
How to get device's MAC addressIn our setup, all devices are connected to our router, so we can easily view their MAC addresses directly from the router's dashboard. Log in to your router dashboard and navigate to the section where all connected devices are listed. There, you should be able to see the MAC addresses of all the connected devices.
Another method to obtain the MAC address of the devices, specifically for the ESP32s (including the camera and the relay controller), is by uploading the following code from random nerd tutorials:
References
Abbas. (2023, December 28). Diode anode Cathode Identification (Easy Methods 2024). Yaman Electronics. https://www.yamanelectronics.com/diode-anode-cathode-identification
Santos, S., & Santos, S. (2024, June 11). Get ESP32/ESP8266 MAC address and change it (Arduino IDE) | Random nerd tutorials. Random Nerd Tutorials. https://randomnerdtutorials.com/get-change-esp32-esp8266-mac-address-arduino/






{kind=link}
Comments
Please log in or sign up to comment.