




Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Thanos is a fictional character, a supervillain. It appears in the comic books published by Marvel. Controlled by Arduino in this project.
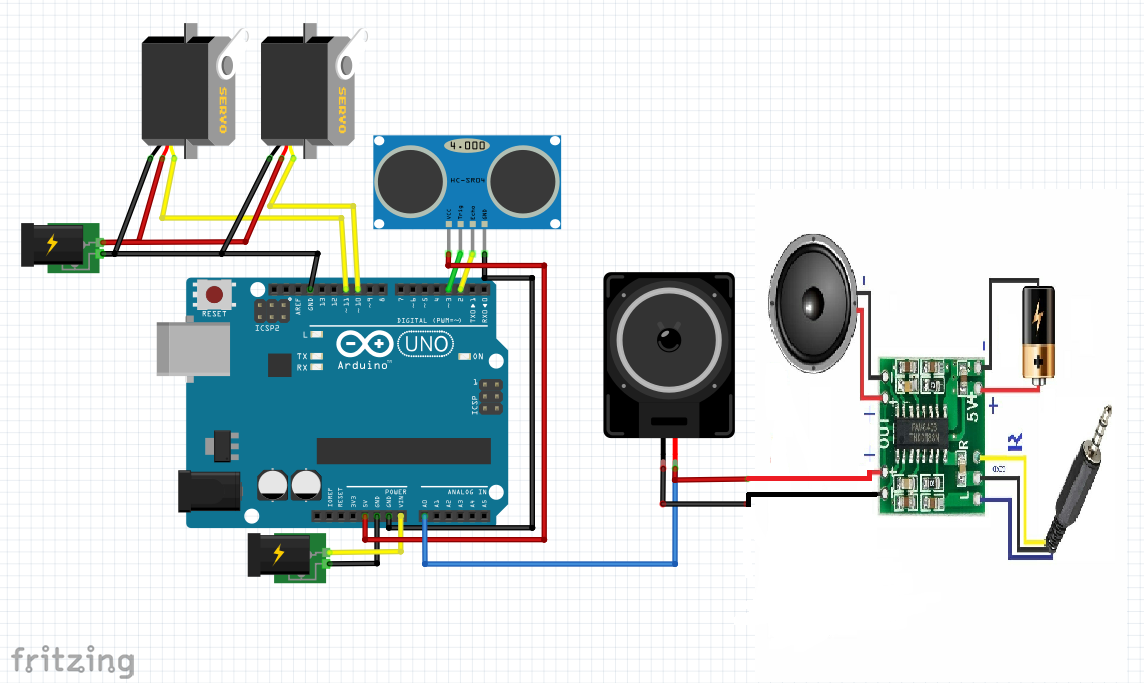
Our project uses the Arduino Uno board to read the Ultrasonic sensor. If someone is identified at 50 cm is he activa relay board (connected in the play of the sound box) and the servo of the mouth.
When the Relay activates the play of the sound box, it plays a song (Thanos' voices) and the frequency of loudspeaker activates the servo in the mouth.
Thanos
- We use a servo to move the mouth.
- We use a servo to move the head.
- We use an Ultrasonic Sensor to detect people.
- We used 2 green LEDs to light up while he speaks.
Head circuit
Circuit chest
Servant of the head
Mouth servant

{kind=link}

14 projects • 113 followers
Professor de robótica com Arduino e Raspberry, estudando e aplicando conhecimentos de I.A. usando a Linguagem Python como base.
Comments
Please log in or sign up to comment.