


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Although tooth decay and tooth loss have been declining in recent decades, more than nine of 10 working-age Americans have cavities in permanent teeth. “Among adults aged 20-64, 91 percent had caries and 27 percent had untreated tooth decay, ” conclude the authors of a data brief from the National Center for Health Statistics[1].
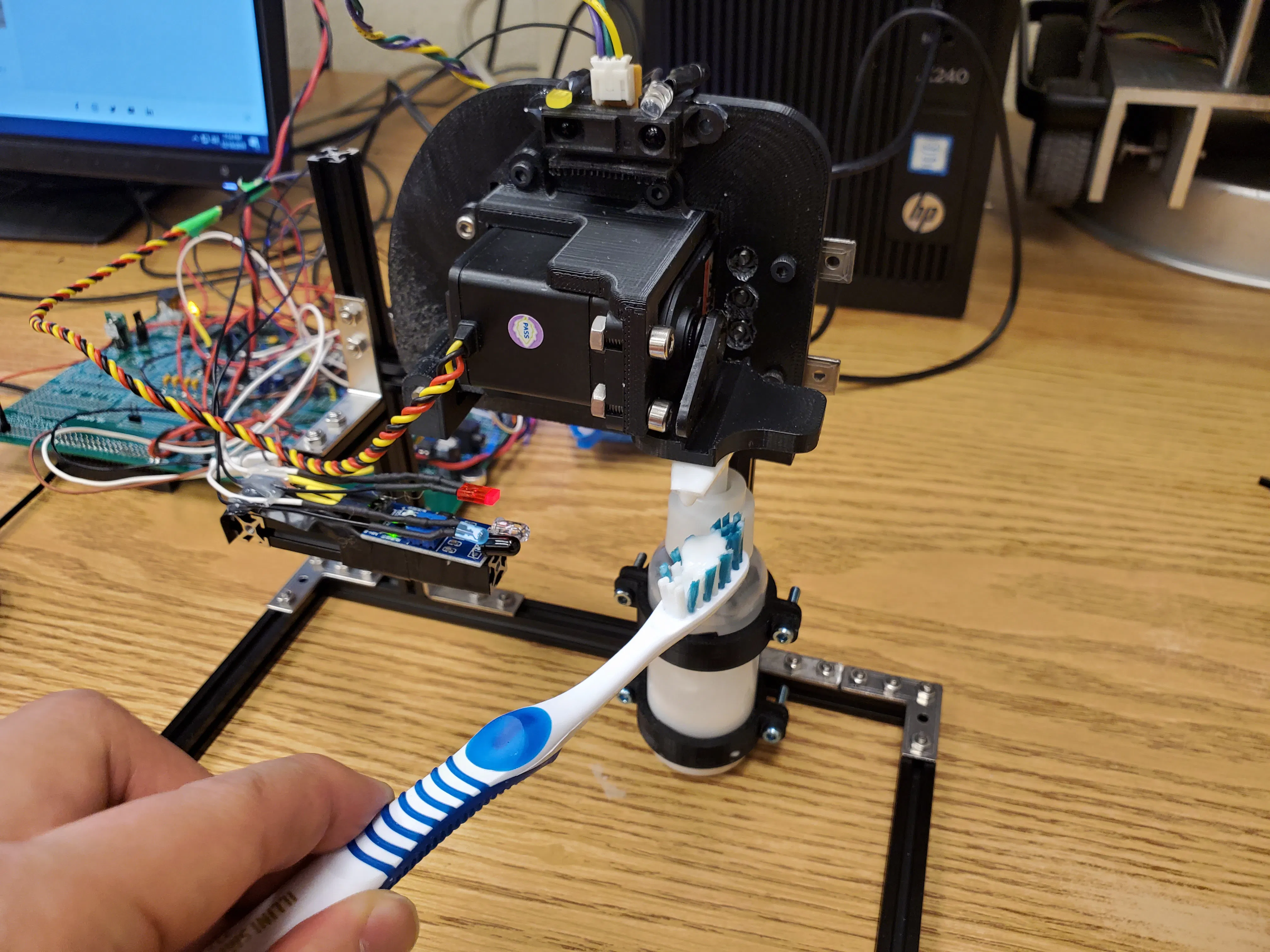
Our goal is to develop a companion machine for your tooth’s well-being. This automated machine advises users to brush their teeth. Moreover, the machine recognizes toothbrush and squeezes adequate amount from preloaded toothpaste.
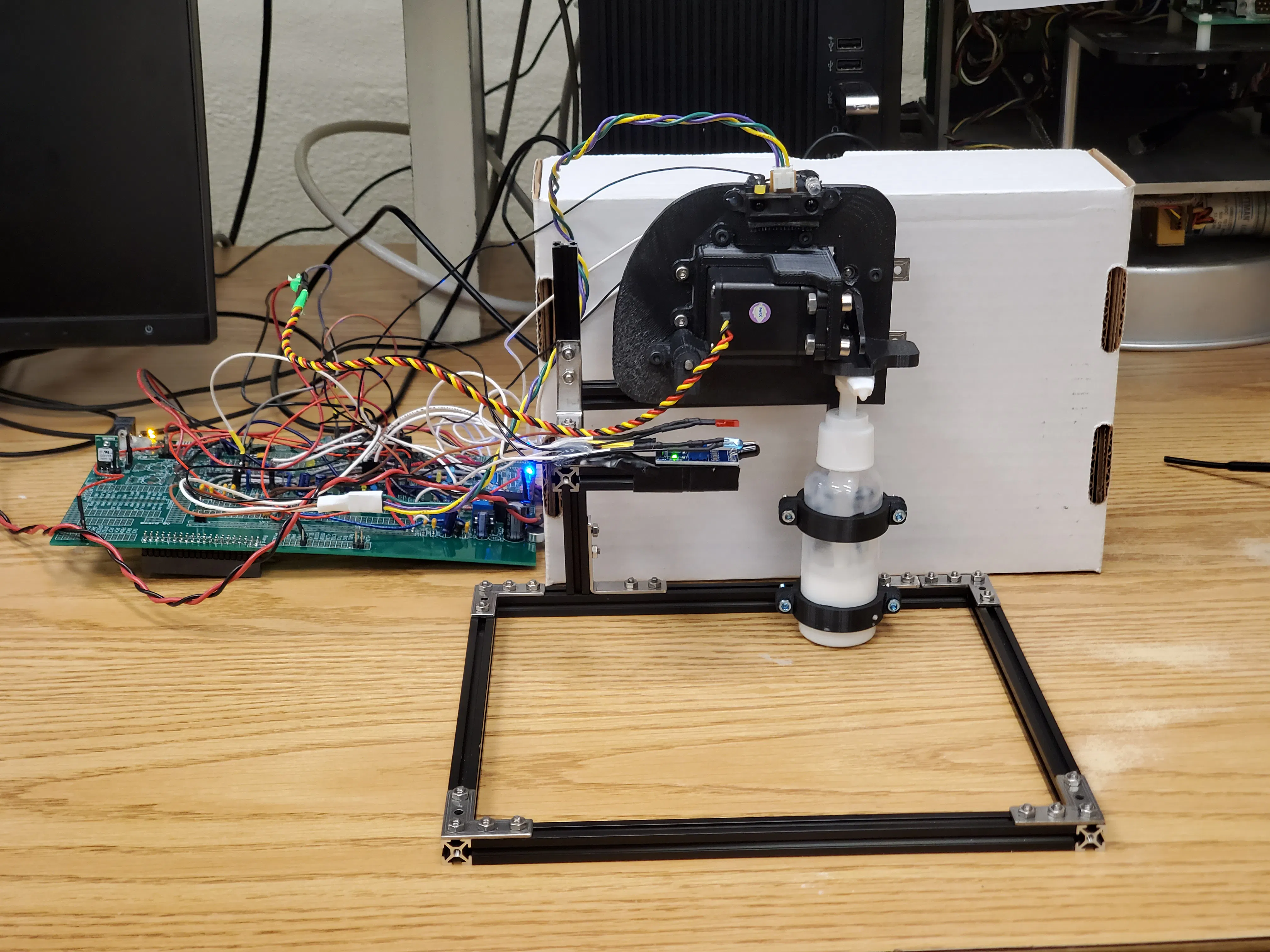
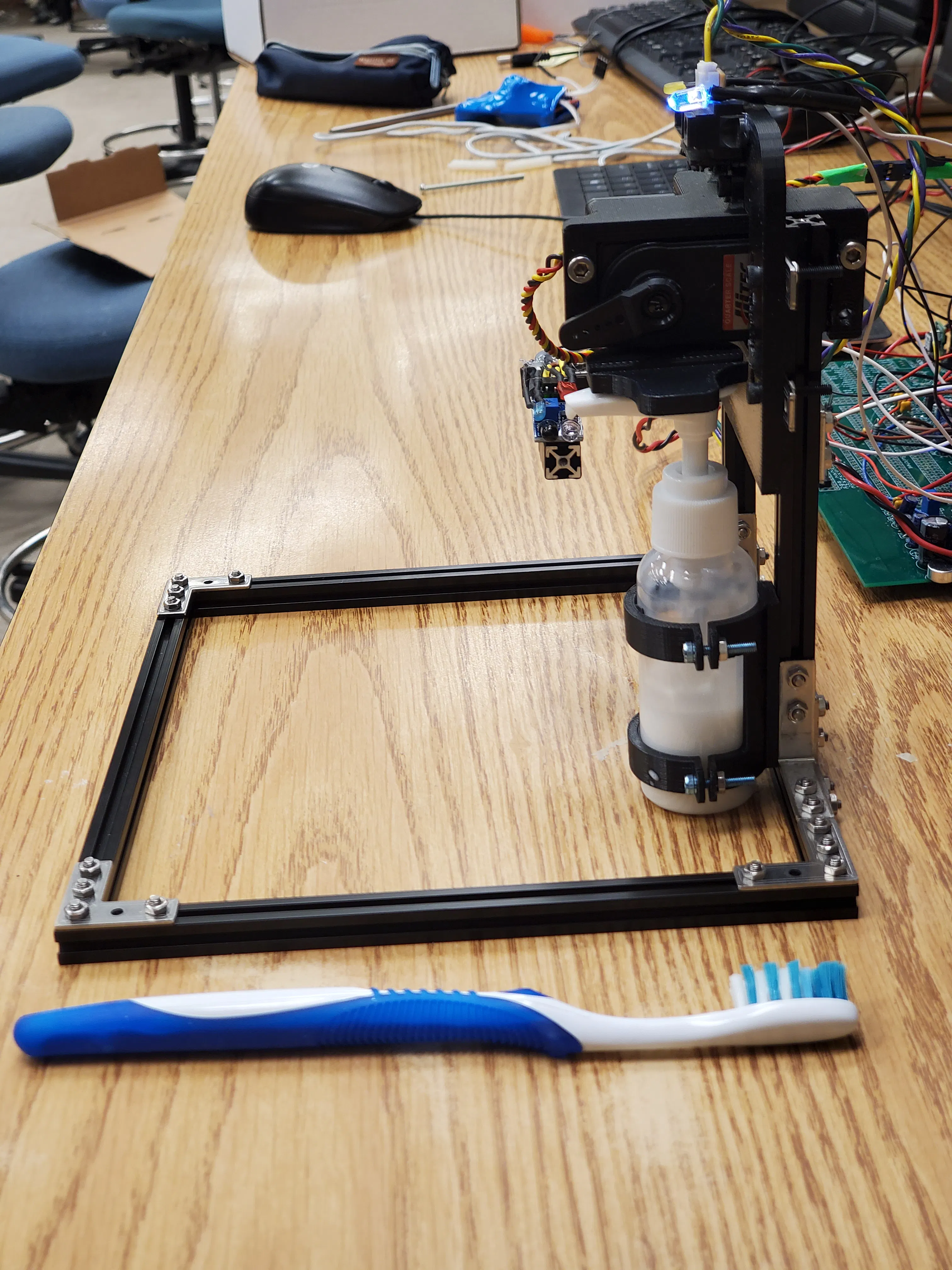
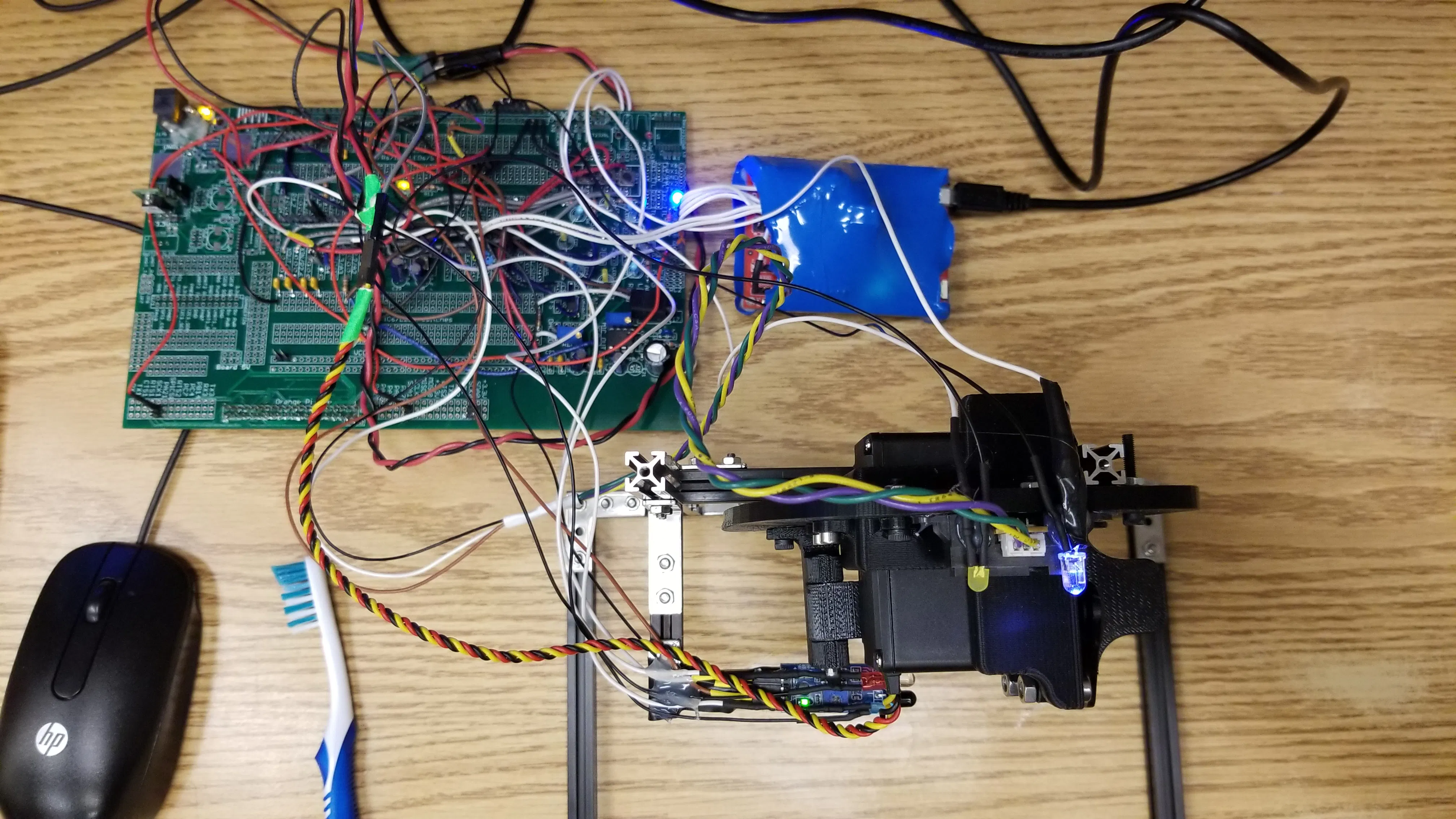
The proximity sensor (model GP2Y0A21YK0F) detects the presence of a person when near and the other proximity sensor (FC-51) detects whether a brush is positioned under the dispenser. The RC servo (Hitec Hs-755HB) squeezes the dispenser. All sensors and the motor are communicating and controlled under MSP430F2272 16-bit microcontroller. To operate the machine appropriately in various situations, a state machine is developed, and the switching condition is triggered based on proximity sensor signals.
Followings are this machine’s features and required hardware to realize corresponding functions.
Situation 1.
If a person comes to the machine, GP2Y0A21YK0F proximity sensor detects the person, and a white LED blinks to inform that the sensor detects the person. When the person stands in front of the machine more than 5 seconds, then a red LED blinks to guide the person to bring a toothbrush under the dispenser. If the toothbrush is positioned properly, a blue LED is turned on. After 3 seconds, the dispenser squeezes toothpaste on the brush. Next, a yellow LED blinks during the recommended brushing time, and it turns stationary yellow LED to guide a gargle time.
Situation 2.
If a person stands in front of the machine, but not for brushing teeth, (such as just for washing hands), the state machine is looped between first two states. Therefore, the dispenser does not squeeze toothpaste.
Situation 3.
If a toothbrush is not positioned properly under the dispenser, then the dispenser does not squeeze toothpaste until the person properly positions the brush again.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.