



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 10 | |||
Hey everyone. Are you a lazy? If yes then we all have experienced the high gravity when we are waking up. The problem comes when you are sweating in bed and you want to increase the fan speed. The tendency to sleep and the wish to increase the speed both come at the time. So we need a fan that can be controlled by hand. That’s what we are going to do.
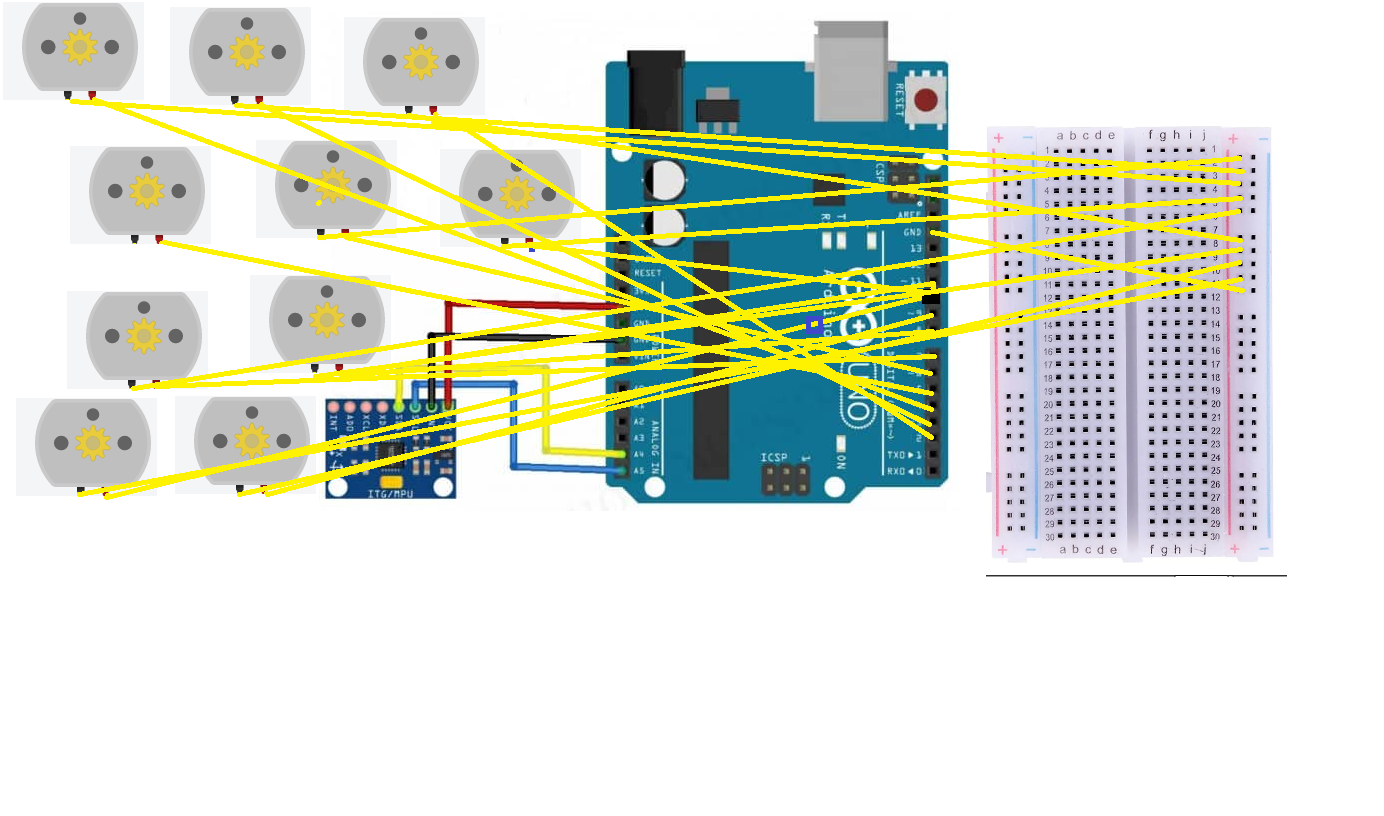
Connections:
One pin of all 10 dc motors to 2, 3, 4, 5, 6, 7, 8, 9, 10, 11
Another pin of all 10 dc motors to GND
SCL of accelerometer to A5 of Arduino
SCA of accelerometer to A4 of Arduino
GND of accelerometer to GND of Arduino
VCC of accelerometer to VCC of Arduino
ADVERTIZEMENT:
**********************Don’t skip**************************
Are you interested in making your own arduino project and rely on mysources.
If you rely on my sources then you might have your own ideas thatneither I have not uploaded or nor others. So you might leave the hopes on completingthat project. But there is no need for youas I will helpyou out personally. Yes you heard it right. I will complete your project. Allyou need is just to press this link.
https://www.freelancer.in/hireme/pranavmadhavaram
*****************advertisementcompleted******************
Code:
#include<Wire.h>
const int MPU_addr=0x68;
int16_t AcX, AcY, AcZ, Tmp, GyX, GyY, GyZ;
int minVal=265;
int maxVal=402;
double x;
double y;
double z;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr, 14, true);
AcX=Wire.read()<<8|Wire.read();
AcY=Wire.read()<<8|Wire.read();
AcZ=Wire.read()<<8|Wire.read();
int xAng = map(AcX, minVal, maxVal, -90, 90);
int yAng = map(AcY, minVal, maxVal, -90, 90);
int zAng = map(AcZ, minVal, maxVal, -90, 90);
x= RAD_TO_DEG * (atan2(-yAng, -zAng)+PI);
y= RAD_TO_DEG * (atan2(-xAng, -zAng)+PI);
z= RAD_TO_DEG * (atan2(-yAng, -xAng)+PI);
Serial.print("AngleX= ");
Serial.println(x);
Serial.print("AngleY= ");
Serial.println(y);
Serial.print("AngleZ= ");
Serial.println(z);
Serial.println("-----------------------------------------");
delay(400);
if(x<=10||x>=1)
{digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=20||x>=11)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=30||x>=21)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=40||x>=31)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=50||x>=41)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=60||x>=51)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=70||x>=61)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=80||x>=71)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
if(x<=90||x>=81)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
}
if(x<=90||x>=81)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
}
if(x>=90)
{digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
}}
ADVERTIZEMENT:
**********************Don’t skip**************************
Are you interested in making your own arduino project and rely on mysources.
If you rely on my sources then you might have your own ideas thatneither I have not uploaded or nor others. So you might leave the hopes oncompleting that project. But there is no need for youas I will help youout personally. Yes you heard it right. I will complete your project. All youneed is just to press this link.
https://www.freelancer.in/hireme/pranavmadhavaram
*****************advertisementcompleted******************
Precautions:
1) Attach a plastic fan to all motors
2) Make sure that all motors give air and don’t suck air if it doesn’t happen then exchange its connections
3) (Optional)To get cool air make sure air passes through ice cold water
how to use:
1) attach sensor to your fore arm and rotate it
ADVERTIZEMENT:
**********************Don’tskip**************************
Are you interested in making yourown arduino project and rely on my sources.
If you rely on my sources thenyou might have your own ideas that neither I have not uploaded or nor others.So you might leave the hopes on completing that project. But there is no needfor youas Iwill help you out personally. Yes you heard it right. I will complete yourproject. All you need is just to press this link.
https://www.freelancer.in/hireme/pranavmadhavaram
*****************advertisementcompleted******************



{kind=link}
Comments
Please log in or sign up to comment.