#include <Servo.h>
Servo ml,mr;
int i,j;
float pi= 3.1428;
float l=6; //l = 6 cm length of link
float x,y,dl,dr,hl,hr;
float pl1,pl2,pr1,pr2;
int tl,tr;
float angle_left(float x, float y){
Serial.println("Left : ");
dl= sqrt((x*x)+(y*y)); //distace between origin left and (x,y) point
hl=sqrt((l*l)-((dl/2)*(dl/2))); //height of the triangle
pl1=atan2(hl,dl/2); // phi 1, angle between d and axis
pl2=atan2(y,x); // phi 2, angle between d and l
tl= (pl1+pl2)*180/pi; // anglie between axis and l
Serial.println(hl);
Serial.println(pl1*180/pi);
Serial.println(pl2*180/pi);
Serial.println(tl);
return tl;
}
float angle_right(float x, float y){
x-=6;
Serial.println("Right : ");
dr= sqrt(((x)*(x))+(y*y)); //distace between origin right and (x,y) point
hr=sqrt((l*l)-((dr/2)*(dr/2))); //height of the triangle
pr1=atan2(hr,dr/2); // phi 1, angle between d and axis
pr2= atan2(y,x); // phi 2, angle between d and l
tr=(pr2-pr1)*180/pi;
Serial.println(hr);
Serial.println(pr1*180/pi);
Serial.println(pr2*180/pi);
Serial.println(tr);
return tr;
}
// Extreme Left Point
void xleft(){
mr.write(110);
ml.write(110);
}
// Extreme Right Point
void xright(){
mr.write(45);
ml.write(45);
}
// Extreme Top Point
void xtop(){
mr.write(90);
ml.write(90);
}
//Extreme Bottom Point
void xbottom(){
mr.write(60);
ml.write(120);
}
void vertical_straight_line(){
x=3;
y=6;
for(y=6;y<12;y+=0.5){
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(50);
}
for(y=11;y>5;y-=0.5){
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(50);
}
}
void horizontal_straight_line(){
x=0;
y=6;
for (x;x<7;x+=1){
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
}
}
void setup() {
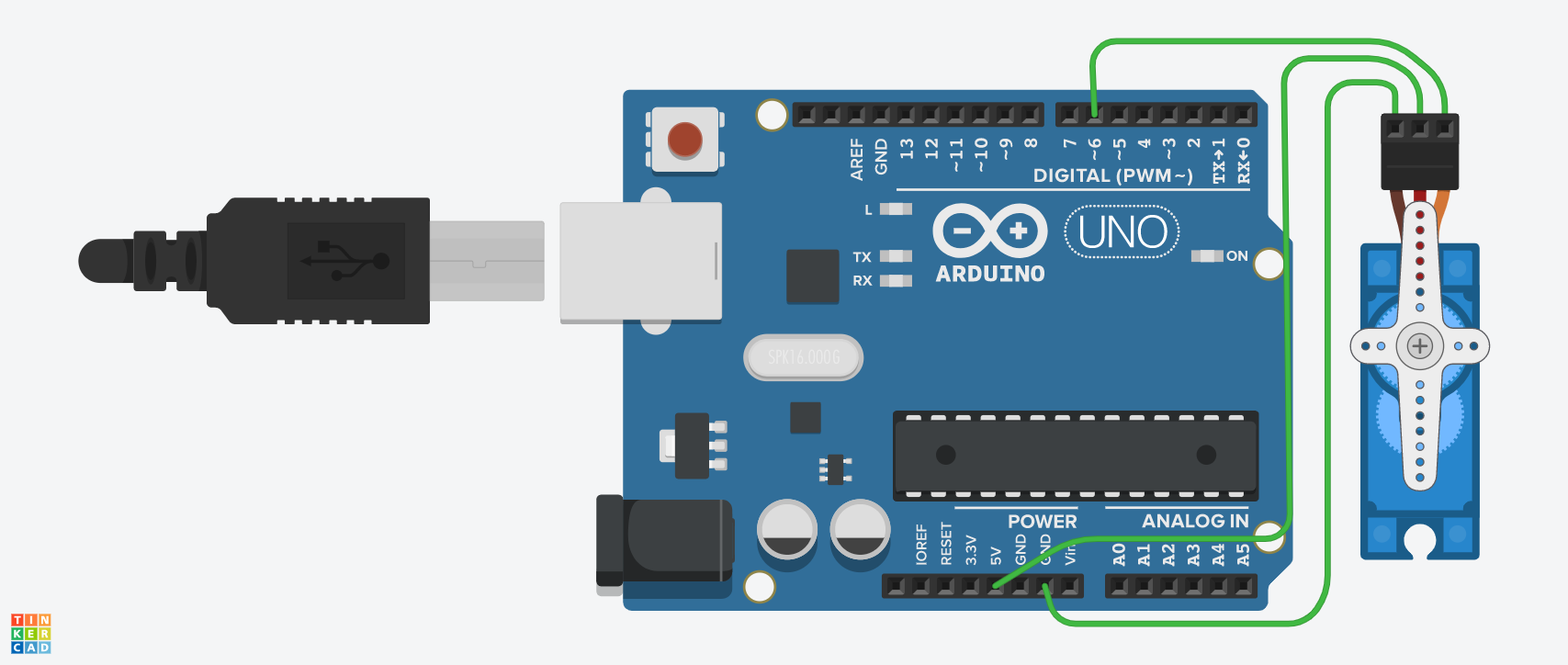
ml.attach(5);
mr.attach(6);
Serial.begin(9600);
}
void loop() {
//int a[8][2]=[[1, 1], [0, 2], [1, 3], [2, 3], [3, 3], [4, 2], [3, 1], [2, 1]] //making 0
//int a[12][2]={{1, 1}, {0, 2}, {0, 3}, {1, 4}, {2, 5}, {3, 5}, {4, 4}, {5, 3}, {5, 2}, {4, 1}, {3, 0}, {2, 0}}; //making O or dimond
//int a[12][2]={{0,0}, {1,1}, {2,2}, {3,3}, {4,4}, {5,5},{5,5}, {4,4}, {3,3}, {2,2}, {1,1}, {0,0}};// making / digonal line
//int a[20][2]={{0,0},{0,1},{0,2},{0,3},{0,4},{0,5},{1,5},{2,5},{3,5},{4,5},{5,5},{5,4},{5,3},{5,2},{5,1},{5,0},{4,0},{3,0},{2,0},{1,0}}; // making [] square
for (i=0;i<sizeof(a)/4;i+=1){
x=a[i][0];
y=a[i][1]+5;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(300);
}
x=1;
y=1*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=0;
y=2*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=1;
y=3*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=2;
y=3*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=3;
y=3*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=4;
y=2*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=3;
y=1*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=2;
y=1*2;
y+=3;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
delay(500);
x=3;
y=11;
ml.write(angle_left(x,y));
mr.write(angle_right(x,y));
xtop();
delay(1000);
xright();
delay(300);
xbottom();
delay(1000);
xleft();
delay(300);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
Comments
Please log in or sign up to comment.