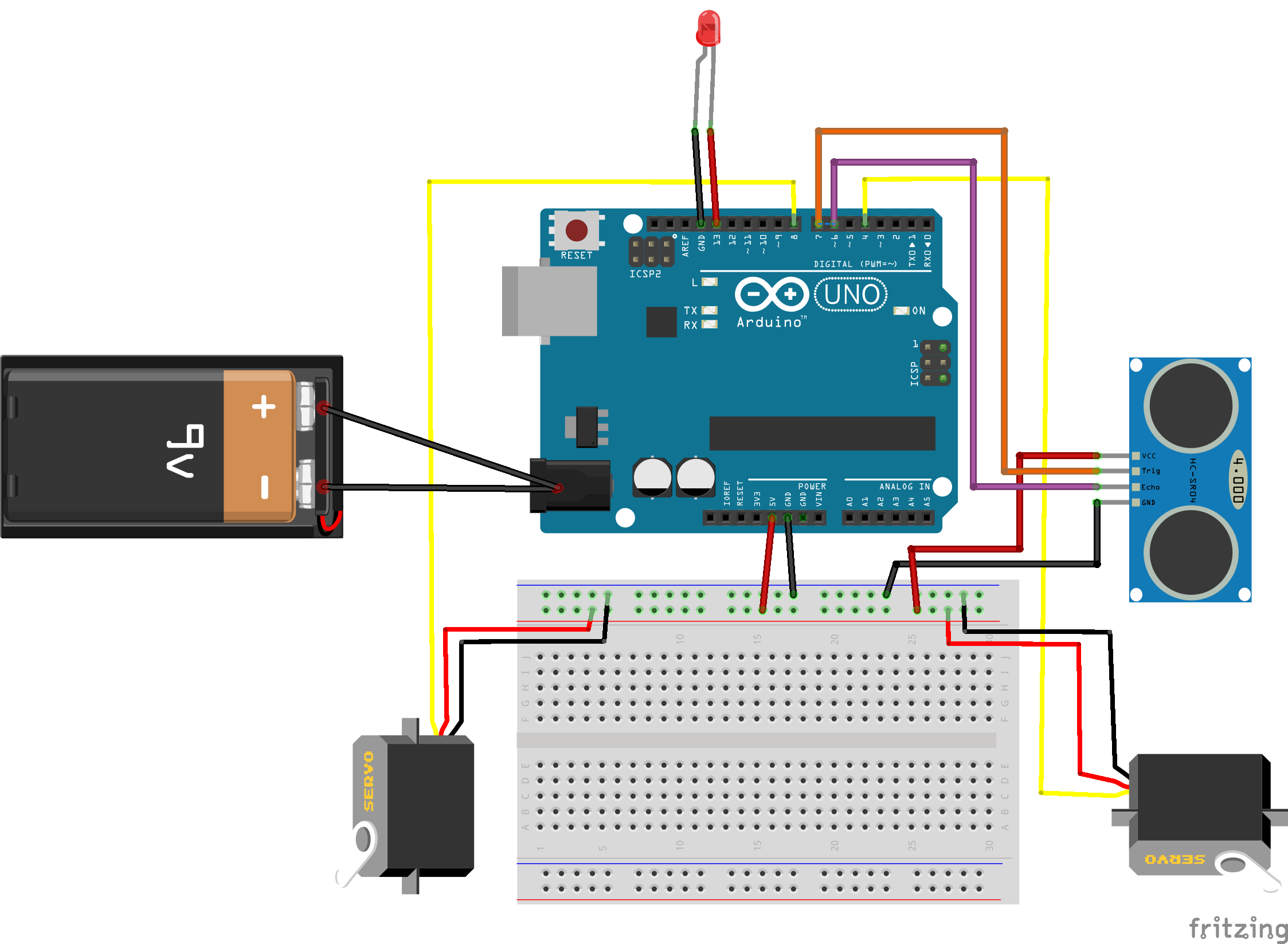
servo1.attach(8); //tratar de cambiar
servo2.attach(4);
Serial.begin (9600); // inicializa el puerto serie a 9600 baudios
pinMode(Pecho, INPUT); //define el pin 6 como entrada (echo)
pinMode(Ptrig,OUTPUT); //define el pin 7 como salida (triger)
pinMode (13, 1); //define el pin 13 como salida
}
void loop() {
// aqui el codigo se ejecuta
servo1.write(0);
servo2.write(0);
delay(5);
digitalWrite(Ptrig, LOW);
delayMicroseconds(2);
digitalWrite(Ptrig, HIGH); // genera el pulso de triger por 10ms
delayMicroseconds(10);
digitalWrite(Ptrig, LOW);
duracion = pulseIn(Pecho, HIGH);
distancia = (duracion/2) / 29; // calcula la distancia en centimetros
if (distancia >= 500 || distancia <= 0){ // si la distancia es mayor a 500cm o menor a 0cm
Serial.println("no se detectan manos"); // no mide nada
//aqui el servo debe estar en posicion alta
}
else {
Serial.print(distancia); // envia el valor de la distancia por el puerto serial
Serial.println("cm"); // le coloca a la distancia los centimetros "cm"
digitalWrite(13, 0); // en bajo el pin 13
servo1.write(90);//aqui el servo debe bajar para tirar la cuerda
servo2.write(0);//aqui el servo debe bajar para tirar la cuerda
//digitalWrite(4, 1); //no se si va
//aqui el servo debe bajar para tirar la cuerda|
}
if (distancia <= 10 && distancia >= 1){
digitalWrite(13, 1); // en alto el pin 13 si la distancia es menor a 10cm
//digitalWrite(4, 0); //no se si va
Serial.println("Manos detectadas"); // envia la palabra Alarma por el puerto serial
servo1.write(0);//aqui el servo debe bajar para tirar la cuerda
servo2.write(90);//aqui el servo debe bajar para tirar la cuerda
}
delay(400);
}











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.