This project was built as the final deliverable for our Embedded System course.
The Guide Robot
INTRODUCTION
As you know in the museums and historic places we need to a guider to introduce the historic things to us. We decide to do this work comfortable with robots. The Guide Robot exactly do this work for us. This robot is a line follower, so it walks on the black line and it will be controlled by raspberry pi in future.(in future it will be completed.) So the robot stops in front of the historic things such as painting boards, antique object and etc when the operator commands it to stop. Then the operator plays the voice of introducing by a telegram robot command. So the robot works as useful as a guider.
HIGH LEVEL DESIGN
figure 1. high level design of guide robot
As you see in figure 1, the robot has been controlled by telegram bot. so we need wi-fi. then with operator's command in telegram bot, the speaker on the robot plays an audio.
HARDWARE
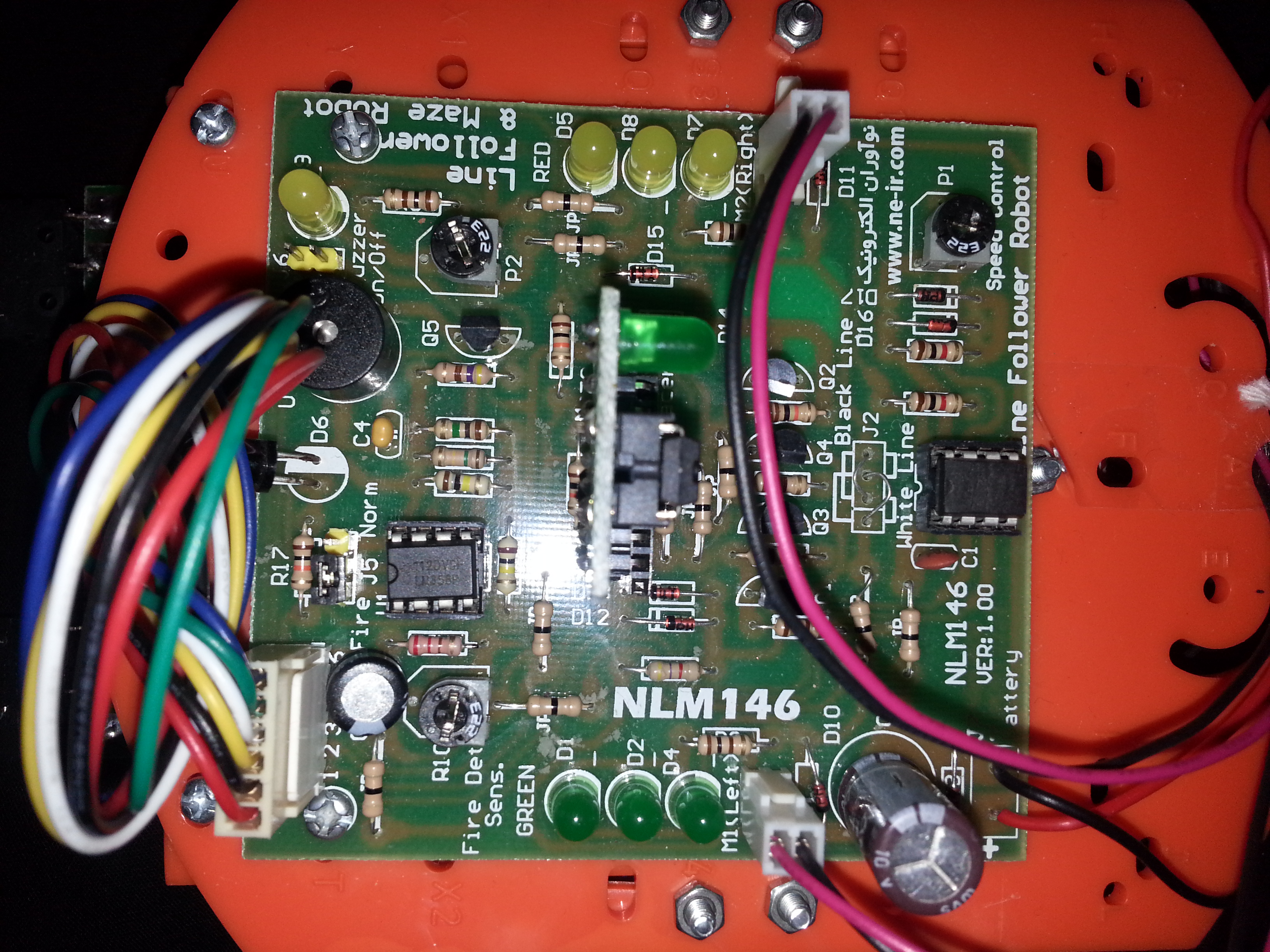
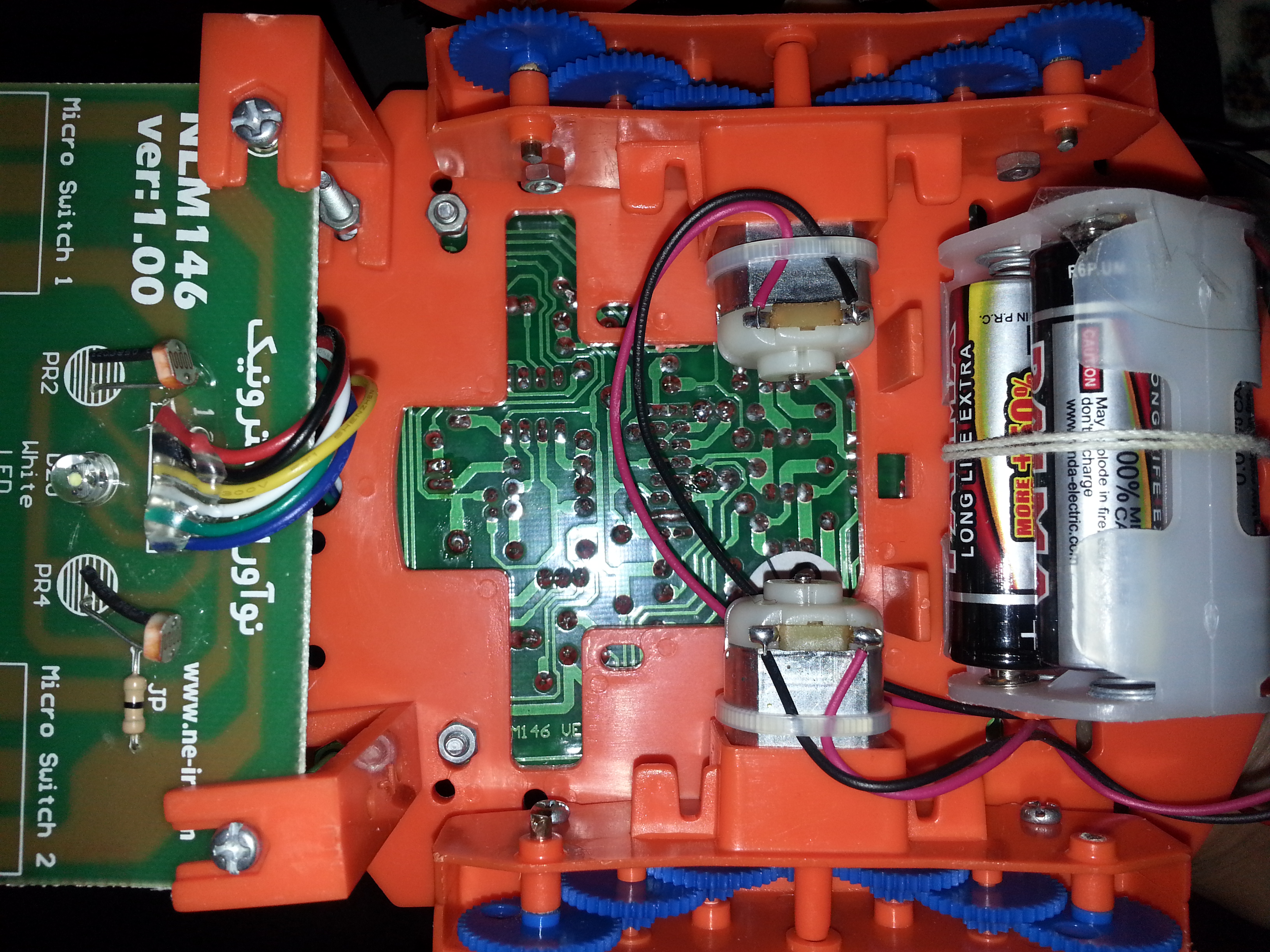
This project has 2 parts. First is the robot that controlled by raspberry pi. To build a robot we need 2 DC motors that controlled by DC motor driver. 4 wheels, gearboxes, and the body that all of the components fix on it. For line follower robot we use infrared sensor that notices black (dark) and white (bright). so when the robot goes the left side of the black line, the left wheels will turn to put the robot exactly on the black line. and when the robot goes to the right side of the line, the right wheels will turn. So the robot moves directly on the black line.This robot powers with four 1.5 volt battery.
The second part is controlling the robot's voice with telegram bot. It doesn't have any difficult hardware. So we can fix a speaker with AUX cable to the raspberry pi. we need five 1.5 volt battery to power raspberry pi without laptop. Also we should use smart phone (or laptop) and telegram app in it to use telegram bot. So our hardware is ready.
IN FUTURE
In future it is necessary to control the robot with raspberry pi.
























{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.