English Language
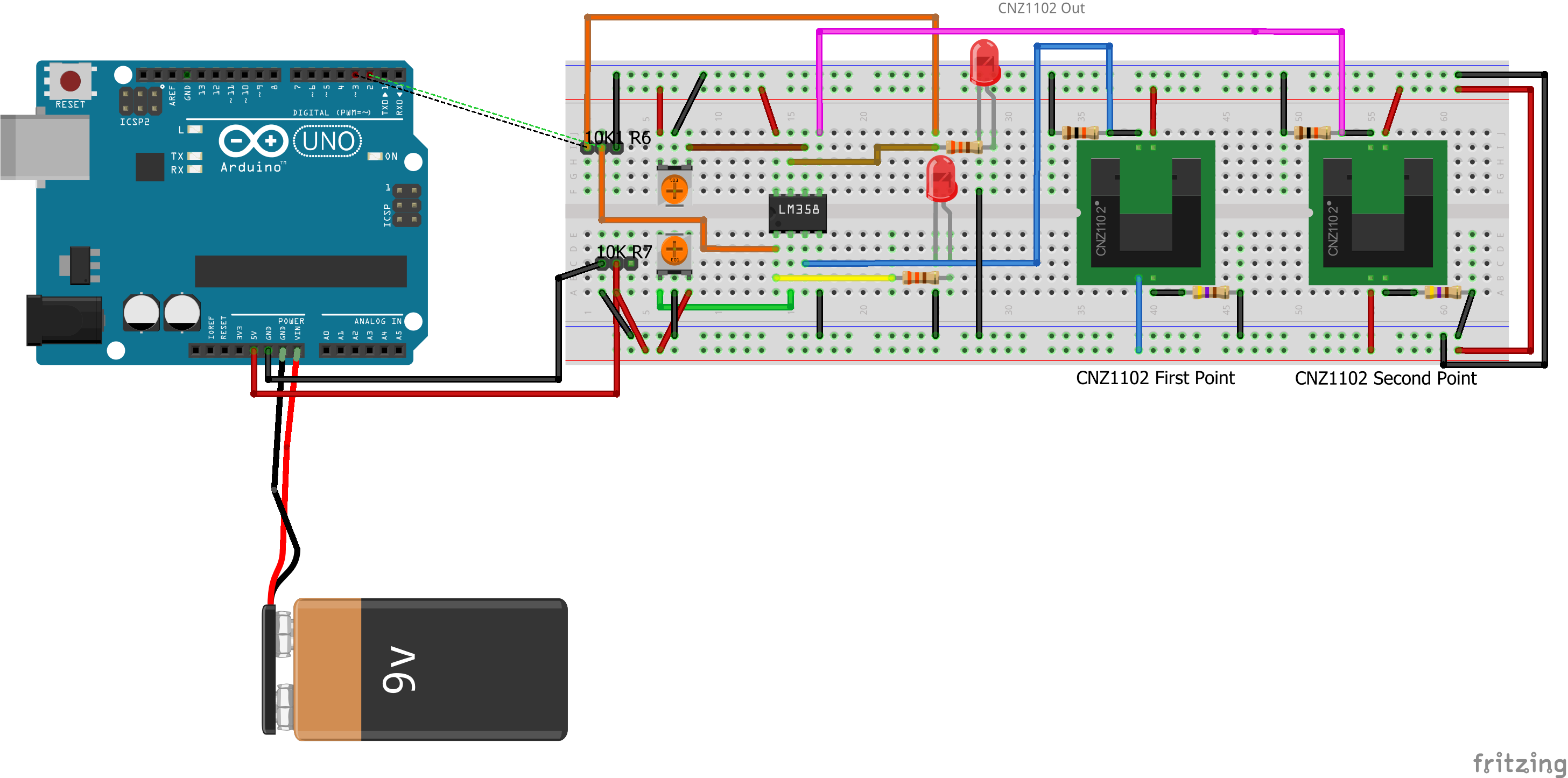
My project is to design a device that measures the speed of anything. This device, which will measure in meters / seconds, is generally referred to as a chronograph. It can measure with a 5% margin of error in theory, but in practice it has a margin of roughly 15% deviation. Because the transmission speed of electronic parts using ambient heat etc. This multiplies the margin of error. For example, the CNZ1102 (Photo lnterrupters) I used in the project has a typical 6 µs, Max 200 µs delay and the LM358 transmission speed is around 15 µs. So you are likely to experience some loss in practice. Any trigger mechanism that will trigger pin 2 and pin 3 respectively on the arduino can be used instead of the Transmissive Photosensors I am using. Interrupts are used in the Arduino program, the aim is to get the clearest possible output and the least waste of time. The device can measure with an accuracy of 1 µs.
Here is the code and information I came across on forum.arduino.cc.
RobTilleart
Türkçe Dili
Projem herhangi birşeyin hızını ölçen bir cihaz tasarlamak. Metre / saniye cinsinden ölçüm yapacak bu cihaz genelde kronograf diye anılmaktadır. Teoride %5 hata payı ile ölçüm yapabilmektedir fakat pratikte kabaca %15 sapma payı vardır. Çünkü çevre ısısı kuyllanılan elektronik parçaların iletim hızı vs. bu hata payını çoğaltmaktadır. Örneğin projede kullandığım CNZ1102 (Photo lnterrupters) tipik 6 µs, Max 200 µs gecikme yapıyor ve LM358 iletim hızı ise 15 µs civarında. Bu yüzden pratikte biraz kayıp yaşamanız olasıdır. Kullandığım Transmissive Photosensors yerine arduino'daki pin 2 ve pin 3'ü sırasıyla tetikleyecek herhangi bir tetikleyici mekanizma kullanılabilir. Arduino programında Interrupts kullanılmıştır, amaç en az zaman kaybı ve olabilecek en net çıktıyı alabilmektir. Cihaz1 µs hassasiyet ile ölçüm yapabiliyor.
Burada forum.arduino.cc de rastladığım kod ve bilgiler yeralmakta. RobTilleart



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







 osman_cyp
osman_cyp
{kind=link}
Comments
Please log in or sign up to comment.