

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
“A man sets himself the task of depicting the world. Year after year, he fills a space with images of provinces, kingdoms, mountains, bays, ships, islands, fishes, rooms, instruments, stars, horses, and people. Just before he dies, he discovers that out of this patient labyrinth of lines emerge the features of his own face.”
Jorge Luis Borges, The Maker
This fragment by Jorge Luis Borges was kind of prophetic. AI Face Recognition easily links features of a face with the owner’s world, including his crimes. What could go wrong? A few years ago, a man named Guillermo Federico Ibarrola was arrested in Buenos Aires after being pointed by a Russian made software from NTechLab as the author of an aggravated robbery. Five days of terror went by before someone found the error: different second name.
What tools are available to fight back Facial Recognition abuse?
There are several projects to fool facial recognition. From Tshirts with patterns to jewelry and IR lights. I will try to contribute with these simple servo based glasses with a location based auto arm feature.
“Facial recognition is a challenging pattern recognition problem in computing. Facial recognition systems attempt to identify a human face, which is three-dimensional and changes in appearance with lighting and facial expression, based on its two-dimensional image. To accomplish this computational task, facial recognition systems perform four steps. First face detection is used to segment the face from the image background. In the second step the segmented face image is aligned to account for face pose, image size and photographic properties, such as illumination and grayscale. The purpose of the alignment process is to enable the accurate localization of facial features in the third step, the facial feature extraction. Features such as eyes, nose and mouth are pinpointed and measured in the image to represent the face. The so established feature vector of the face is then, in the fourth step, matched against a database of faces.” (Wikipedia)
So, hiding or changing the position of the eyes, nose and mouth could work, right?
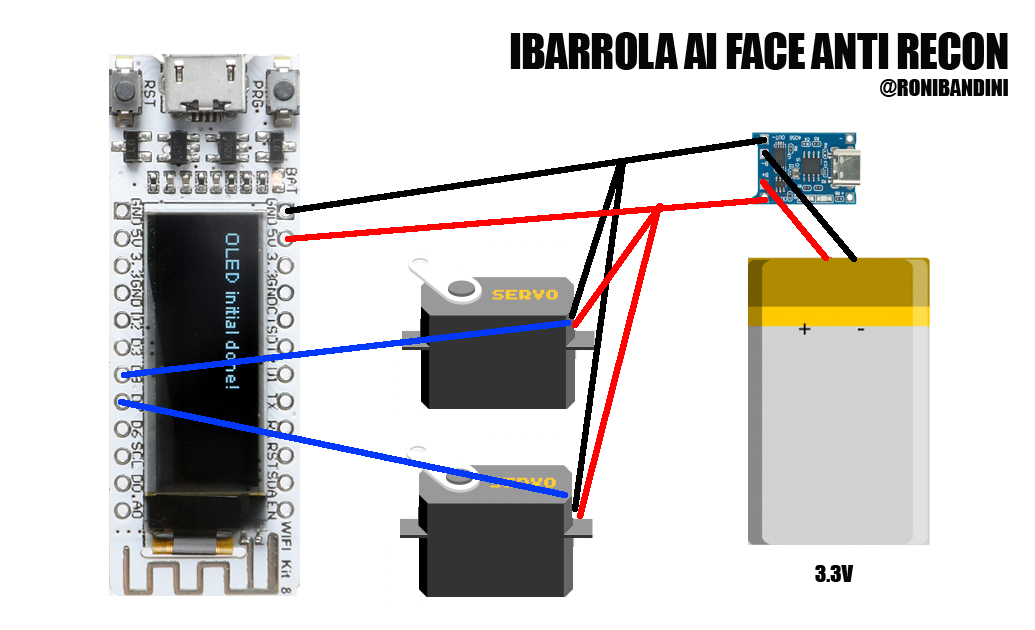
Two cheap SG90 servos mounted over old glasses frame will be controlled by an ESP board. Why an ESP board? Glasses will have an automatic arm feature based on WiFi SSID scaning. Example: if you know that facial recognition cams are located in bus terminals, you can configure the device to be armed when specific WIFI routers found in the bus terminal.
Note: with en easy modification, VK16 GPS module can be used but consider that GPS signal is weak inside buildings.
Parts- 1 x DFRobot Firebeetle ESP8266
- 2 x SG90 servos
- 1 x 3.7v battery
- 1 x TP4056 charger
- Old glasses frame
- 3D parts
- 1 fake toy nose - or 3d printed
Servo to D7, D8, GND and 3.3v TP4056 Battery out to battery + and -. TP4056 + and – to ESP8266 VIN and GND. On board button is used but if your board does not have one, you can use an external button.
3d printed partsThere are 4 3d parts to print. 2 of them belongs to the ESP8266 box and 2 of them servo arms. Nose should be attached to the big servo arm.
SoftwareDownload the software from Github https://github.com/ronibandini/Ibarrola
Edit settings, like name of the cam SSID to be recognized and upload with Arduino IDE.
More details about settings configuration in PCBWay community
// Auto arm SSID to detect
String ssidDetect="XXXXXXX";English CC available. You can forward to 1.41 for the actual demo.
References





{kind=link}
Comments
Please log in or sign up to comment.