


Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 3 | |||
 |
| × | 3 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This Project Is a blind stick which I simulated on tinkercad
the link:
https://www.tinkercad.com/things/l7icPjPgrkE
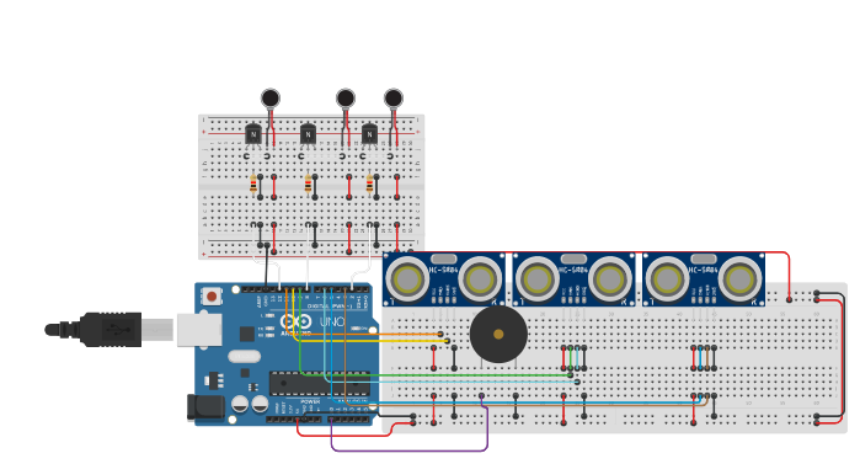
an Image of the simulation:
This is the circuit diagram
Buzzer - A0
Left side:
ultrasonic sensor
trigger-11
echo-10
motor:
transistor collector- motor ground
transistor base - 1 k ohm, which connects to Dp12
transistor emitter - ground
motor positive - VCC
Middle :
trigger pin-9
echo pin - 6
transistor connections are the same as the left sides, only base connects to 8
Right Side:
trigger pin - 5
echo pin - 3
transistor connections are the same as the left sides, only base connects to 2
Left side:
ultrasonic sensor
trigger-11
echo-10
motor:
transistor collector- motor ground
transistor base - 1 k ohm, which connects to Dp12
transistor emitter - ground
motor positive - VCC
Middle :
trigger pin-9
echo pin - 6
transistor connections are the same as the left sides, only base connects to 8
Right Side:
trigger pin - 5
echo pin - 3
transistor connections are the same as the left sides, only base connects to 2


{kind=link}
Comments