/*
* Project Smart_Bar_Main
* Author: Rudy Parra
* Date: Nov 30th 2023
*
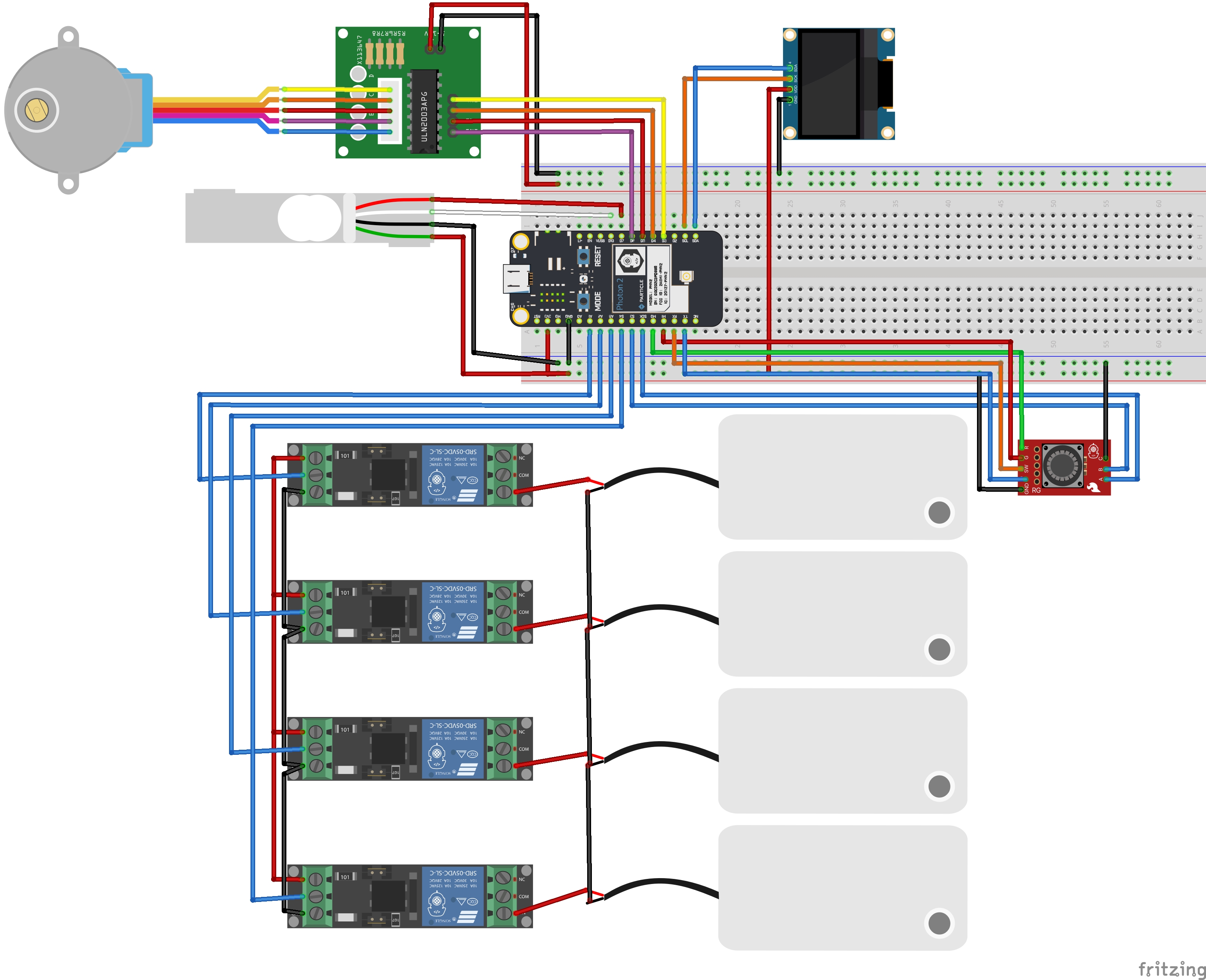
* Description: This code will help the deivce dispense the appropriate amounts of liquids to make a
* perfect cocktail. Alont with providing the capabilities to remotley start the device to make you, your
* choice of cocktail.
*
*/
// Including Necessary Libraries
#include "Particle.h"
#include "math.h"
#include "IoTClassroom_CNM.h"
#include "Adafruit_GFX.h"
#include "Adafruit_SSD1306.h"
#include <Adafruit_MQTT.h>
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include "HX711.h"
#include "credentials.h"
#include <Encoder.h>
#include "Button.h"
#include "Stepper.h"
#include <neopixel.h>
//******** SETTING INTS & OBJECTS FOR ALL CONNECTED DEVICES ************//
// Setting NEOPIXEL Variables
int numPixels = 16;
Adafruit_NeoPixel pixel(numPixels, SPI1, WS2812B); // Use D6 for NeoPixels (SPI1)
// Setting Pump Ints
int pump1 = D19;
int pump2 = D14;
int pump3 = D13;
int pump4 = D12;
//Setting Encoder PINS
int PINA = D17;
int PINB = D18;
const int REDLED = D8;
const int GREENLED = D9;
const int BLUELED = D15;
const int BUTTONPIN = D16;
//Setting Class Encoder
class Encoder myEnc(PINA,PINB);
//Setting Button
Button button(BUTTONPIN);
//Setting Time Varibales
unsigned long startTime;
String DateTime, TimeOnly, DateOnly;
//Setting OLED Display Objects
Adafruit_SSD1306 display(-1);
//******* SETTING UP WIRELESS CONNECTION PROTOCOLS *******//
SYSTEM_MODE(AUTOMATIC);
//****** ESTABLISHING FUNCTIONS *******//
void cocktailSelector();
void margaritaFunction();
void condimentDispenser();
void setup() {
//Setting up Serial Monitor
Serial.begin (9600); //Enable Serial Monitor
waitFor(Serial.isConnected,10000); //waits for Serial Monitor
Serial.println("Ready to Go"); //Prints that Serial Monitor is Ready to go
//Setting Time Millis
startTime = millis(); //get the current time;
Time.zone(-7); //MST = -7, MDT = -6
Particle.syncTime(); //Sync time with Particle Cloud
//Setting OLED DISPLAY Parameters
display.begin(SSD1306_SWITCHCAPVCC, 0x3D);
display.display();
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
//display.setCursor(0, 0);
display.display();
//Setting Encoder LEDs
//pinMode(BUTTONPIN, INPUT_PULLDOWN);
pinMode(GREENLED, OUTPUT);
pinMode(REDLED, OUTPUT);
pinMode(BLUELED, OUTPUT);
//Pump Setup
pinMode(pump1, OUTPUT);
pinMode(pump2, OUTPUT);
pinMode(pump3, OUTPUT);
pinMode(pump4, OUTPUT);
}
void loop() {
digitalWrite(pump1, HIGH); //Testing Pump
digitalWrite(pump2, HIGH); //Testing Pump
digitalWrite(pump3, HIGH); //Testing Pump
digitalWrite(pump4, HIGH); //Testing Pump
cocktailSelector();
}
void cocktailSelector(){
// Decarling Integers
static int prevEnc;
static int position;
int i;
int j;
// Decalring Time Parameters
DateTime = Time.timeStr(); //Current Date and Time from Particle Time Class
TimeOnly = DateTime.substring(11,19); //Extract the time from the DateTime String
DateOnly = DateTime.substring(0,10); //Extracts the date from the DateTIme
// Setting the Encoder Default Light to Purple
digitalWrite(GREENLED, HIGH); // Set the green LED to ON
digitalWrite(REDLED, LOW); // Set the red LED to OFF
digitalWrite(BLUELED, LOW); // Set the red LED to OFF
//Setting NeoPixel Status Ring
//for (i = 0; i<numPixels; i++) {
pixel.setPixelColor(j, 255, 255, 255);
pixel.setBrightness(30);
pixel.show();
//}
position = myEnc.read(); // Reading Encoder Position
Serial.printf("position: %i\n",position);// Print Position on Serial Monitor
//if (position != prevEnc) {
prevEnc = position;
switch (position) {
case 4:
display.clearDisplay();
display.printf("Margarita");
display.setCursor(0, 25);
display.display();
if ((position == 4) && (button.isClicked())){
digitalWrite(GREENLED, HIGH);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, LOW);
Serial.printf("Button Clicked on \n");
margaritaFunction();
}
break;
case 8:
display.clearDisplay();
display.printf("Tequila \nSunrise");
display.setCursor(0, 25);
display.display();
if ((position == 8) && (button.isClicked())){
digitalWrite(GREENLED, HIGH);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, LOW);
Serial.printf("Button Clicked on \n");
delay(1000);
digitalWrite(pump2, HIGH); //Testing Pump
delay(2000);
digitalWrite(pump2, LOW); //Testing Pump
condimentDispenser();
digitalWrite(GREENLED, LOW);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, HIGH);
delay(1000);
}
break;
case 12:
display.clearDisplay();
display.printf("Screw \nDriver");
display.setCursor(0, 25);
display.display();
if ((position == 12) && (button.isClicked())){
digitalWrite(GREENLED, HIGH);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, LOW);
Serial.printf("Button Clicked on \n");
delay(1000);
digitalWrite(pump3, HIGH); //Testing Pump
delay(2000);
digitalWrite(pump3, LOW); //Testing Pump
condimentDispenser();
digitalWrite(GREENLED, LOW);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, HIGH);
delay(1000);
}
break;
case 16:
display.clearDisplay();
display.printf("Vodka \nCranberry");
display.setCursor(0, 25);
display.display();
if ((position == 16) && (button.isClicked())){
digitalWrite(GREENLED, HIGH);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, LOW);
Serial.printf("Button Clicked on \n");
delay(1000);
digitalWrite(pump4, HIGH); //Testing Pump
delay(2000);
digitalWrite(pump4, LOW); //Testing Pump
condimentDispenser();
digitalWrite(GREENLED, LOW);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, HIGH);
delay(1000);
}
break;
default:
display.clearDisplay();
display.printf("%s\n%s",DateOnly.c_str(), TimeOnly.c_str());
display.setCursor(0, 15);
display.display();
}
//}
}
void margaritaFunction() {
digitalWrite(pump4, HIGH); //Testing Pump
digitalWrite(pump2, HIGH); //Testing Pump
delay(7000);
digitalWrite(pump4, LOW); //Testing Pump
digitalWrite(pump2, LOW); //Testing Pump
delay(10000);
condimentDispenser();
delay(4000);
digitalWrite(GREENLED, LOW);
digitalWrite(REDLED, HIGH);
digitalWrite(BLUELED, HIGH);
delay(1000);
}
void condimentDispenser(){
// Setting Steppers Parameters and Variables
int speed = 15;
int twoRotation = -5096;
int spr = 2048;
int IN1 = D3;
int IN2 = D4;
int IN3 = D5;
int IN4 = D6;
Stepper myStepper (spr, IN1, IN3, IN2, IN4);
myStepper.setSpeed(speed);
// Running the Stepper Motor
myStepper.step(twoRotation);
}






















{kind=link}
Comments
Please log in or sign up to comment.