/*
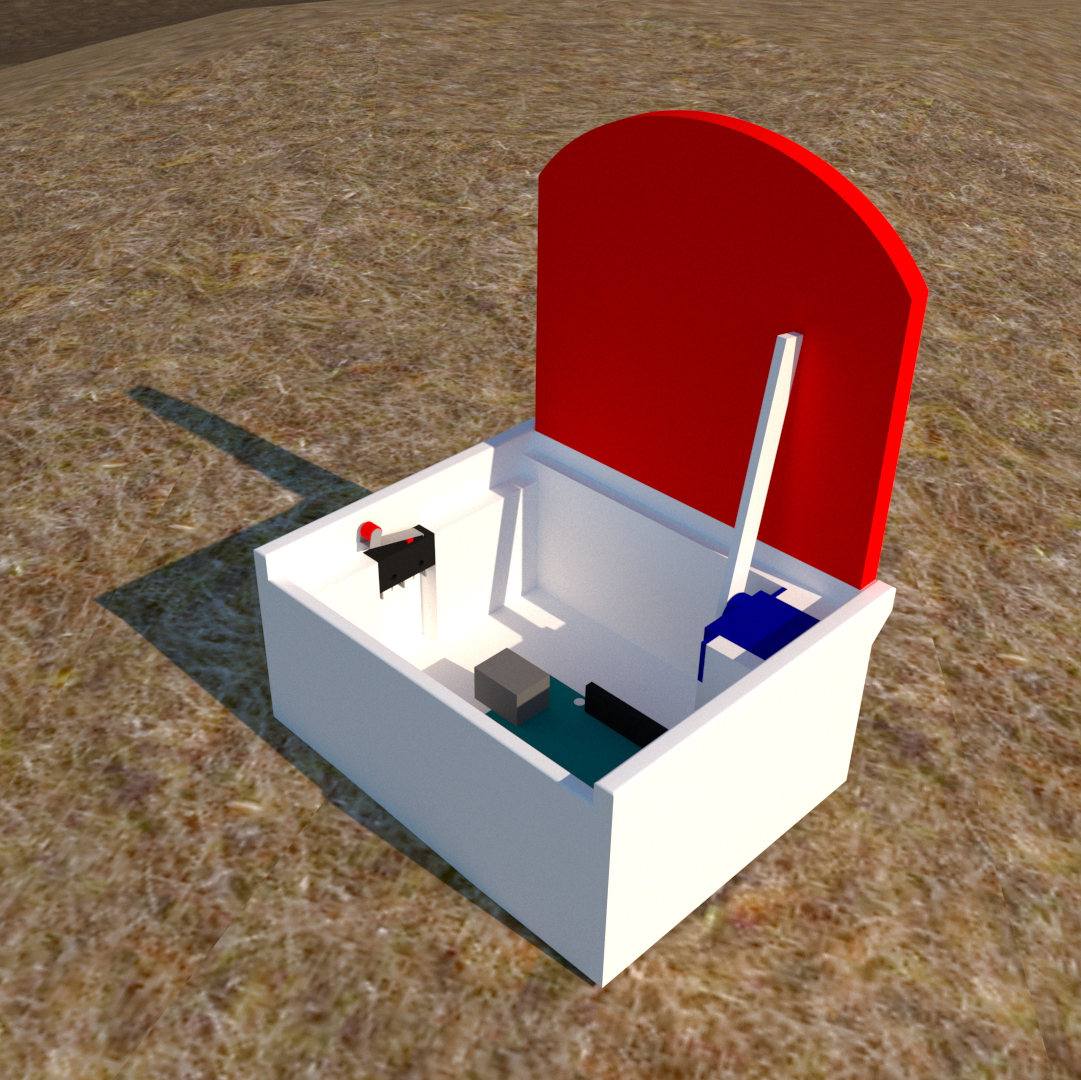
Automatic Gun Practic Target 1.0.0 for Arduino UNO.
Copyright (c) 2023, Sourceduty
This software is free and open-source; anyone can redistribute it and/or modify it.
*/
#include <VarSpeedServo.h>
// constants won't change
const int BUTTON_PIN = 7; // Arduino pin connected to button's pin
const int SERVO_PIN = 9; // Arduino pin connected to servo motor's pin
VarSpeedServo servo; // create servo object to control a servo
// variables will change:
int angle = 0; // the current angle of servo motor
int lastButtonState; // the previous state of button
int currentButtonState; // the current state of button
int Speed = 160;
void setup() {
Serial.begin(9600); // initialize serial
pinMode(BUTTON_PIN, INPUT_PULLUP); // set arduino pin to input pull-up mode
servo.attach(SERVO_PIN); // attaches the servo on pin 9 to the servo object
servo.write(angle);
currentButtonState = digitalRead(BUTTON_PIN);
}
void loop() {
lastButtonState = currentButtonState; // save the last state
currentButtonState = digitalRead(BUTTON_PIN); // read new state
if(lastButtonState == HIGH && currentButtonState == LOW) {
Serial.println("The button is pressed");
// change angle of servo motor
if(angle == 0)
angle = 90;
// control servo motor arccoding to the angle
servo.write(angle,Speed/2);
delay(100);
servo.wait();
servo.wait();
servo.wait();
servo.wait();
}
if(lastButtonState == LOW && currentButtonState == HIGH) {
delay(100);
Serial.println("The button is released");
// change angle of servo motor
if(angle == 90)
angle = 0;
// control servo motor arccoding to the angle
servo.write(angle,Speed);
}
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.