


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 15 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 28 | |||
As an IoT enthusiast, I decided to make some interesting projects and contribute them to the Arduino society.
so, I made this car.
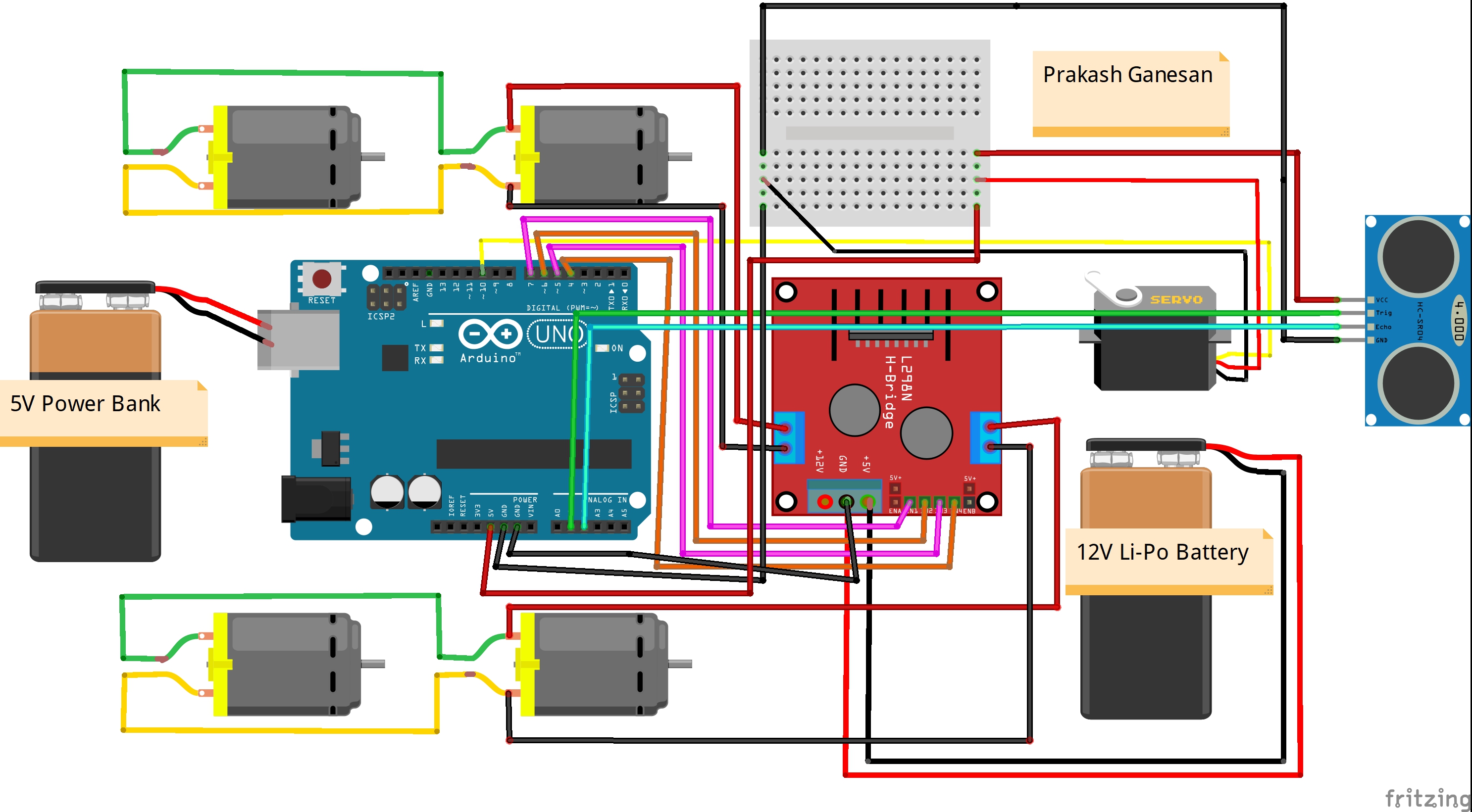
Make all your connections as shown above using all the components
{kind=link}

Comments
Please log in or sign up to comment.