


Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
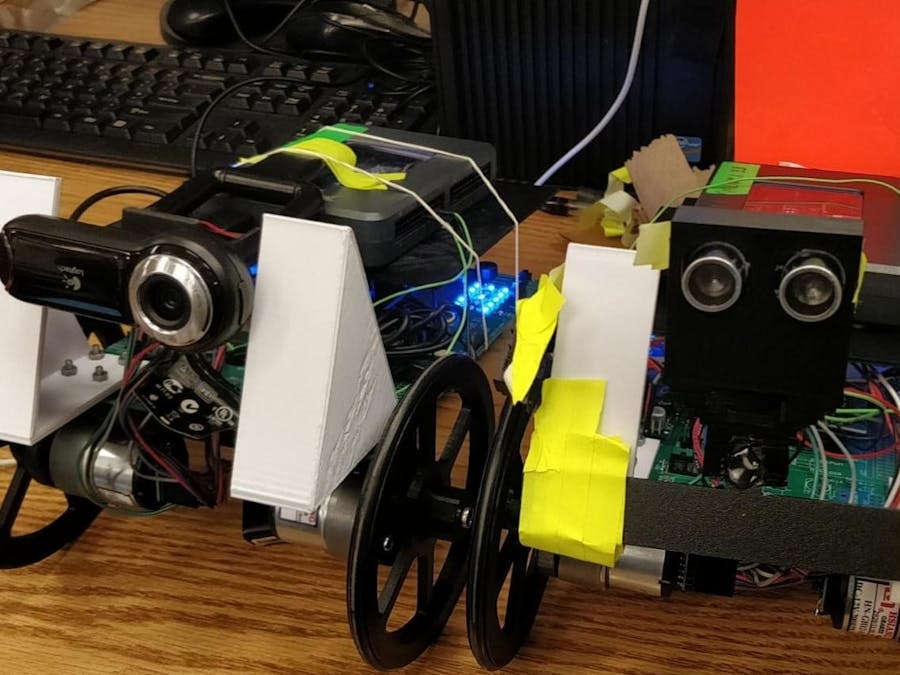
Several industries still struggle with grasping the true idea of Industry 4.0, where every machine is interconnected through the internet. This idea means the employment of sensors, implementing controls and smart programming to ensure machines or robots perform a task efficiently. One such application is in factories where materials have to moved in pallets or carts by rail line controlled robots. Our project is inspired by this idea to set up a system of robots that work together to follow a calculated path and support each other. It also improves upon the concept by introducing an autonomous aspect to it by allowing only the front robot to be programmed to change the target path and remove the need for lined paths for following. This led to the creation of our IR wall sensing and obstacle detection robot as well as the vision sensing robot.
The basic gist of it is that the first robot car uses an IR sensor (mounted on it's right) to follow a wall and an ultrasonic sensor mounted at the front of the car to detect obstacles and turn. The information about co-ordinates obtained from dead reckoning is transmitted with the help of the first MyRio's to the LabVIEW software on a computer where the co-ordinates are displayed, and a map charts the path taken by the car. In addition, we can change up-to ten parameters (Speed, Gain, Turn Rate, etc) on the fly from LabVIEW that govern the distance at which the turn occurs, the speed during a turn, the speed during wall-following, the distance from the wall being followed, and the relevant gain and threshold parameters.
The parameters in the lab-view snippet above allow us to control parameters in the C code snippet here that is used to control how the data from the ultrasonic and IR sensors will be used.
Vision Sensing Robot :
The second car uses a USB camera and it has it's own LabVIEW program and MyRio to transmit information back and forth. In our case, the USB camera tracks the color red and uses the centroid of the "redness" in its view to send a turn value back from the LabVIEW program to the myRio and thus to the robot car that uses the information to turn in a direction aligning it with the seen color. The first car has a piece of red cardboard taped to its back that this car follows. The turn ref value is computed using a sorting system shown in the first LabVIEW code. and is then implemented in the steering control for motor turning.
Robots Schematic
_VHQnnVk5UI.jpeg)
//#############################################################################
// FILE: FinalProject_main_USBCamera.c
//
// TITLE: Final Project
//#############################################################################
// Included Files
#include <stdio.h>
#include <stdlib.h>
#include <stdarg.h>
#include <string.h>
#include <math.h>
#include <limits.h>
#include "F28x_Project.h"
#include "driverlib.h"
#include "device.h"
#include "f28379dSerial.h"
#include "LEDPatterns.h"
#include "song.h"
#include "dsp.h"
#include "fpu32/fpu_rfft.h"
#define PI 3.1415926535897932384626433832795
#define TWOPI 6.283185307179586476925286766559
#define HALFPI 1.5707963267948966192313216916398
// The Launchpad's CPU Frequency set to 200 you should not change this value
#define LAUNCHPAD_CPU_FREQUENCY 200
#define TIMEBASE 0.005 // 1.0/200
// Interrupt Service Routines predefinition
__interrupt void cpu_timer0_isr(void);
__interrupt void cpu_timer1_isr(void);
__interrupt void cpu_timer2_isr(void);
__interrupt void SWI_isr(void);
__interrupt void SPIB_isr(void);
__interrupt void ADCD_ISR(void);
void serialRXA(serial_t *s, char data);
void serialRXC(serial_t *s, char data);
void setup_led_GPIO(void);
// Count variables
uint32_t numTimer0calls = 0;
uint32_t numSWIcalls = 0;
uint32_t numRXA = 0;
uint16_t UARTPrintC = 0;
uint16_t LEDdisplaynum = 0;
int16_t spivalue1 = 0;
int16_t spivalue2 = 0;
int16_t spivalue3 = 0;
uint16_t updown = 0;
int16_t c = 0;
int16_t c2 = 0;
int16_t temp = 0;
int16_t temp1 =0;
int16_t temp2 = 0;
float x = 0;
float y = 0;
int16_t dummy= 0;
int16_t accelXraw = 0;
int16_t accelYraw = 0;
int16_t accelZraw = 0;
int16_t dummy2 = 0;
int16_t gyroXraw = 0;
int16_t gyroYraw = 0;
int16_t gyroZraw = 0;
//int16_t temp = 0;
float LeftWheel = 0;
float RightWheel = 0;
float accelXReading=0.0;
float accelYReading=0.0;
float accelZReading=0.0;
float gyroXReading=0.0;
float gyroYReading=0.0;
float gyroZReading=0.0;
float LeftD = 0;
float RightD = 0;
float uLeft = 0.0;
float uRight = 0.0;
float Posleft_K=0;
float Posleft_K_1=0;
float Posright_K = 0;
float Posright_K_1 = 0;
float VLeftK = 0;
float VRightK = 0;
float Vref = 0.5;
float Ki = 25.0;
float Kp = 3.0;
float ELeft_K = 0;
float ELeft_K_1 = 0;
float ERight_K =0;
float ERight_K_1 = 0;
float ILeft_K = 0;
float ILeft_K_1 = 0;
float IRight_K =0;
float IRight_K_1 = 0;
float ULeft_K =0;
float URight_K =0;
float Eturn = 0;
float turn = 0;
float turn_c = 0;
float R = 0.19685;
float w = 0.57743;
float theta_r = 0.0;
float theta_l = 0.0;
float theta_avg = 0.0;
float VLeftK_1 = 0.0;
float VRightK_1 = 0.0;
float phi_r = 0.0;
float theta_dot_avg= 0.0;
float x_dot_r= 0;
float y_dot_r= 0;
float x_dot_r_1= 0;
float y_dot_r_1= 0;
float y_r = 0;
float x_r = 0;
int16_t UARTPrintA = 0;
int16_t com_state = 0;
char buff[100];
int16_t buffindex = 0;
float sendfloat1 = 0;
float sendfloat2 = 0;
float yk = 0;
float k = 0;
float num1= 0;
float num2= 0;
uint32_t numRXC = 0;
float thresh= 0.005;
float speed_control= 0.0;
void setupSpib(void){
//Step 1.
//Setting up MPU9250 pinouts
GPIO_SetupPinMux(9, GPIO_MUX_CPU1, 0); // Set as GPIO9 and used as DAN28027 SS
GPIO_SetupPinOptions(9, GPIO_OUTPUT, GPIO_PUSHPULL); // Make GPIO9 an Output Pin
GpioDataRegs.GPASET.bit.GPIO9 = 1; //Initially Set GPIO9/SS High so DAN28027 is not selected
GPIO_SetupPinMux(66, GPIO_MUX_CPU1, 0); // Set as GPIO66 and used as MPU-9250 SS
GPIO_SetupPinOptions(66, GPIO_OUTPUT, GPIO_PUSHPULL); // Make GPIO66 an Output Pin
GpioDataRegs.GPCSET.bit.GPIO66 = 1; //Initially Set GPIO66/SS High so MPU-9250 is not selected
GPIO_SetupPinMux(63, GPIO_MUX_CPU1, 15); //Set GPIO63 pin to SPISIMOB
GPIO_SetupPinMux(64, GPIO_MUX_CPU1, 15); //Set GPIO64 pin to SPISOMIB
GPIO_SetupPinMux(65, GPIO_MUX_CPU1, 15); //Set GPIO65 pin to SPICLKB
EALLOW;
//GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1; // For EPWM2A
//GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1; // For EPWM2B
GpioCtrlRegs.GPBPUD.bit.GPIO63 = 0; // Enable Pull-ups on SPI PINs Recommended by TI for SPI Pins
GpioCtrlRegs.GPCPUD.bit.GPIO64 = 0;
GpioCtrlRegs.GPCPUD.bit.GPIO65 = 0;
GpioCtrlRegs.GPBQSEL2.bit.GPIO63 = 3; // Set I/O pin to asynchronous mode recommended for SPI
GpioCtrlRegs.GPCQSEL1.bit.GPIO64 = 3; // Set I/O pin to asynchronous mode recommended for SPI
GpioCtrlRegs.GPCQSEL1.bit.GPIO65 = 3; // Set I/O pin to asynchronous mode recommended for SPI
EDIS;
// ---------------------------------------------------------------------------
SpibRegs.SPICCR.bit.SPISWRESET = 0; // Put SPI in Reset
SpibRegs.SPICTL.bit.CLK_PHASE = 1; //This happens to be the mode for both the DAN28027 and
SpibRegs.SPICCR.bit.CLKPOLARITY = 0; //The MPU-9250, Mode 01.
SpibRegs.SPICTL.bit.MASTER_SLAVE = 1; // Set to SPI Master
SpibRegs.SPICCR.bit.SPICHAR = 15; // Set to transmit and receive 16 bits each write to SPITXBUF
SpibRegs.SPICTL.bit.TALK = 1; // Enable transmission
SpibRegs.SPIPRI.bit.FREE = 1; // Free run, continue SPI operation
SpibRegs.SPICTL.bit.SPIINTENA = 0; // Disables the SPI interrupt
SpibRegs.SPIBRR.bit.SPI_BIT_RATE = 49 ; // Set SCLK bit rate to 1 MHz so 1us period. SPI base clock is
// 50MHZ. And this setting divides that base clock to create SCLK’s period
SpibRegs.SPISTS.all = 0x0000; // Clear status flags just in case they are set for some reason
SpibRegs.SPIFFTX.bit.SPIRST = 1;// Pull SPI FIFO out of reset, SPI FIFO can resume transmit or receive.
SpibRegs.SPIFFTX.bit.SPIFFENA = 1; // Enable SPI FIFO enhancements
SpibRegs.SPIFFTX.bit.TXFIFO = 0; // Write 0 to reset the FIFO pointer to zero, and hold in reset
SpibRegs.SPIFFTX.bit.TXFFINTCLR = 1; // Write 1 to clear SPIFFTX[TXFFINT] flag just in case it is set
SpibRegs.SPIFFRX.bit.RXFIFORESET = 0; // Write 0 to reset the FIFO pointer to zero, and hold in reset
SpibRegs.SPIFFRX.bit.RXFFOVFCLR = 1; // Write 1 to clear SPIFFRX[RXFFOVF] just in case it is set
SpibRegs.SPIFFRX.bit.RXFFINTCLR = 1; // Write 1 to clear SPIFFRX[RXFFINT] flag just in case it is set
SpibRegs.SPIFFRX.bit.RXFFIENA = 1; // Enable the RX FIFO Interrupt. RXFFST >= RXFFIL
SpibRegs.SPIFFCT.bit.TXDLY = 0; //Set delay between transmits to 16 spi clocks. Needed by DAN28027 chip //changed from 16 in ex3 to 0 on ex 4
SpibRegs.SPICCR.bit.SPISWRESET = 1; // Pull the SPI out of reset
SpibRegs.SPIFFTX.bit.TXFIFO = 1; // Release transmit FIFO from reset.
SpibRegs.SPIFFRX.bit.RXFIFORESET = 1; // Re-enable receive FIFO operation
SpibRegs.SPICTL.bit.SPIINTENA = 1; // Enables SPI interrupt. !! I don’t think this is needed. Need to Test
//SpibRegs.SPIFFRX.bit.RXFFIL =16; //Interrupt Level to 16 words or more received into FIFO causes interrupt. This is just the initial setting for the register. Will be changed below
SpibRegs.SPIFFRX.bit.RXFFIL = 8 ; //changed for ex4
SpibRegs.SPICCR.bit.SPICHAR = 0xF;
SpibRegs.SPIFFCT.bit.TXDLY = 0x00;
//Step 2.
// perform a multiple 16 bit transfer to initialize MPU-9250 registers 0x13,0x14,0x15,0x16
// 0x17, 0x18, 0x19, 0x1A, 0x1B, 0x1C 0x1D, 0x1E, 0x1F. Use only one SS low to high for all these writes
// some code is given, most you have to fill you yourself.
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1; // Slave Select Low
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2837xD_PieCtrl.c file.
// Perform the number of needed writes to SPITXBUF to write to all 13 registers. Remember we are
//sending 16 bit transfers, so two registers at a time after the first 16 bit transfer.
// To address 00x13 write 0x00
SpibRegs.SPITXBUF = (0x1300|0x0000);
// To address 00x14 write 0x00 || To address 00x15 write 0x00
SpibRegs.SPITXBUF = (0x0000|0x0000);
// To address 00x16 write 0x00 // To address 00x17 write 0x00
SpibRegs.SPITXBUF = (0x0000|0x0000);
// To address 00x18 write 0x00 // To address 00x19 write 0x13
SpibRegs.SPITXBUF = (0x0000|0x0013);
// To address 00x1A write 0x02 // To address 00x1B write 0x00
SpibRegs.SPITXBUF = (0x0002| 0x0000);
// To address 00x1C write 0x08 // To address 00x1D write 0x06
SpibRegs.SPITXBUF = ( 0x0008 | 0x0006);
// To address 00x1E write 0x00 // To address 00x1F write 0x00
SpibRegs.SPITXBUF = (0x0000|0x0000);
// wait for the correct number of 16 bit values to be received into the RX FIFO
while(SpibRegs.SPIFFRX.bit.RXFFST != 7);
GpioDataRegs.GPCSET.bit.GPIO66 = 1; // Slave Select High
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
// ???? read the additional number of garbage receive values off the RX FIFO to clear out the RX FIFO
DELAY_US(10); // Delay 10us to allow time for the MPU-2950 to get ready for next transfer.
//Step 3.
// perform a multiple 16 bit transfer to initialize MPU-9250 registers 0x23,0x24,0x25,0x26
// 0x27, 0x28, 0x29. Use only one SS low to high for all these writes
// some code is given, most you have to fill you yourself.
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1; // Slave Select Low
// Perform the number of needed writes to SPITXBUF to write to all 7 registers
SpibRegs.SPITXBUF = (0x2300|0x0000);
// To address 00x23 write 0x00
// To address 00x24 write 0x40
// To address 00x25 write 0x8C
SpibRegs.SPITXBUF = (0x4000|0x008C);
// To address 00x26 write 0x02
// To address 00x27 write 0x88
SpibRegs.SPITXBUF = (0x0200|0x0088);
// To address 00x28 write 0x0C
// To address 00x29 write 0x0A
SpibRegs.SPITXBUF = (0x0C00|0x000A);
// wait for the correct number of 16 bit values to be received into the RX FIFO
while(SpibRegs.SPIFFRX.bit.RXFFST !=4);
GpioDataRegs.GPCSET.bit.GPIO66 = 1; // Slave Select High
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
// ???? read the additional number of garbage receive values off the RX FIFO to clear out the RX FIFO
DELAY_US(10); // Delay 10us to allow time for the MPU-2950 to get ready for next transfer.
//Step 4.
// perform a single 16 bit transfer to initialize MPU-9250 register 0x2A
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
// Write to address 0x2A the value 0x81
SpibRegs.SPITXBUF = (0x2A00|0x0081);
// wait for one byte to be received
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x3800 | 0x0001); // 0x3800
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x3A00 | 0x0001); // 0x3A00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6400 | 0x0001); // 0x6400
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6700 | 0x0003); // 0x6700
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6A00 | 0x0020); // 0x6A00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6B00 | 0x0001); // 0x6B00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7500 | 0x0071); // 0x7500
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7700 | 0x00E1); // 0x7700 0x00EB
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7800 | 0x00CC); // 0x7800
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7A00 | 0x00F3); // 0x7A00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7B00 | 0x00FE); // 0x7B00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7D00 | 0x001C); // 0x7D00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7E00 | 0x00E0); // 0x7E00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(50);
// Clear SPIB interrupt source just in case it was issued due to any of the above initializations.
SpibRegs.SPIFFRX.bit.RXFFOVFCLR=1; // Clear Overflow flag
SpibRegs.SPIFFRX.bit.RXFFINTCLR=1; // Clear Interrupt flag
PieCtrlRegs.PIEACK.all = PIEACK_GROUP6;
}
//Lab 6 code to set up motor control
void init_eQEPs(void) {
// setup eQEP1 pins for input
EALLOW;
//Disable internal pull-up for the selected output pins for reduced power consumption
GpioCtrlRegs.GPAPUD.bit.GPIO20 = 1; // Disable pull-up on GPIO20 (EQEP1A)
GpioCtrlRegs.GPAPUD.bit.GPIO21 = 1; // Disable pull-up on GPIO21 (EQEP1B)
GpioCtrlRegs.GPAQSEL2.bit.GPIO20 = 2; // Qual every 6 samples
GpioCtrlRegs.GPAQSEL2.bit.GPIO21 = 2; // Qual every 6 samples
EDIS;
// This specifies which of the possible GPIO pins will be EQEP1 functional pins.
// Comment out other unwanted lines.
GPIO_SetupPinMux(20, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(21, GPIO_MUX_CPU1, 1);
EQep1Regs.QEPCTL.bit.QPEN = 0; // make sure eqep in reset
EQep1Regs.QDECCTL.bit.QSRC = 0; // Quadrature count mode
EQep1Regs.QPOSCTL.all = 0x0; // Disable eQep Position Compare
EQep1Regs.QCAPCTL.all = 0x0; // Disable eQep Capture
EQep1Regs.QEINT.all = 0x0; // Disable all eQep interrupts
EQep1Regs.QPOSMAX = 0xFFFFFFFF; // use full range of the 32 bit count
EQep1Regs.QEPCTL.bit.FREE_SOFT = 2; // EQep uneffected by emulation suspend in Code Composer
EQep1Regs.QPOSCNT = 0;
EQep1Regs.QEPCTL.bit.QPEN = 1; // Enable EQep
// setup QEP2 pins for input
EALLOW;
//Disable internal pull-up for the selected output pinsfor reduced power consumption
GpioCtrlRegs.GPBPUD.bit.GPIO54 = 1; // Disable pull-up on GPIO54 (EQEP2A)
GpioCtrlRegs.GPBPUD.bit.GPIO55 = 1; // Disable pull-up on GPIO55 (EQEP2B)
GpioCtrlRegs.GPBQSEL2.bit.GPIO54 = 2; // Qual every 6 samples
GpioCtrlRegs.GPBQSEL2.bit.GPIO55 = 2; // Qual every 6 samples
EDIS;
GPIO_SetupPinMux(54, GPIO_MUX_CPU1, 5); // set GPIO54 and eQep2A
GPIO_SetupPinMux(55, GPIO_MUX_CPU1, 5); // set GPIO54 and eQep2B
EQep2Regs.QEPCTL.bit.QPEN = 0; // make sure qep reset
EQep2Regs.QDECCTL.bit.QSRC = 0; // Quadrature count mode
EQep2Regs.QPOSCTL.all = 0x0; // Disable eQep Position Compare
EQep2Regs.QCAPCTL.all = 0x0; // Disable eQep Capture
EQep2Regs.QEINT.all = 0x0; // Disable all eQep interrupts
EQep2Regs.QPOSMAX = 0xFFFFFFFF; // use full range of the 32 bit count.
EQep2Regs.QEPCTL.bit.FREE_SOFT = 2; // EQep uneffected by emulation suspend
EQep2Regs.QPOSCNT = 0;
EQep2Regs.QEPCTL.bit.QPEN = 1; // Enable EQep
}
float readEncLeft(void) {
int32_t raw = 0;
uint32_t QEP_maxvalue = 0xFFFFFFFFU; //4294967295U
raw = EQep1Regs.QPOSCNT;
if (raw >= QEP_maxvalue/2) raw -= QEP_maxvalue; // I don't think this is needed and never true
// 5 North South magnet poles in the encoder disk so 5 square waves per one revolution of the
// DC motor's back shaft. Then Quadrature Decoder mode multiplies this by 4 so 20 counts per one rev
// of the DC motor's back shaft. Then the gear motor's gear ratio is 30:1.
return (raw*2*(22.0/7.0)/600.0);
}
float readEncRight(void) {
int32_t raw = 0;
uint32_t QEP_maxvalue = 0xFFFFFFFFU; //4294967295U -1 32bit signed int
raw = EQep2Regs.QPOSCNT;
if (raw >= QEP_maxvalue/2) raw -= QEP_maxvalue; // I don't think this is needed and never true
// 5 North South magnet poles in the encoder disk so 5 square waves per one revolution of the
// DC motor's back shaft. Then Quadrature Decoder mode multiplies this by 4 so 20 counts per one rev
// of the DC motor's back shaft. Then the gear motor's gear ratio is 30:1.
return (raw*2*(-22.0/7.0)/600.0);
}
float saturate(float input, float saturation_limit) {
//first if statement checks if input is a positive number and greater than saturation limit value and if so returns saturation_limit value
if ((input>0)& (input > saturation_limit)){
return saturation_limit;
}
//second if statement checks if input is a negative number with magnitude greater than saturation limit value and if so returns the negative of saturation_limit value
if ((input<0) & (input < -(saturation_limit))){
return (-saturation_limit);
}
// if the code reaches here while running, that means input is between saturation_limit value and -saturation_limit value.
return input;
}
//Lab 6 code that sets up the encoder
void setEPWM2A(float controleffort){
temp1 = saturate(controleffort,10);
c = temp1*125+1250;
EPwm2Regs.CMPA.bit.CMPA = c;
}
void setEPWM2B(float controleffort){
temp2 = saturate(controleffort,10);
c2 = temp2*125+1250;
EPwm2Regs.CMPB.bit.CMPB = c2;
}
void main(void)
{
// 2A
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
InitSysCtrl();
InitGpio();
setup_led_GPIO();
//---------------------------------------------------------
// Trigger pin for HC-SR04
GPIO_SetupPinMux(0, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(0, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO0 = 1;
// Echo pin for HC-SR04
EALLOW;
InputXbarRegs.INPUT7SELECT = 19; // Set eCAP1 source to GPIO-pin
EDIS;
GPIO_SetupPinOptions(19, GPIO_INPUT, GPIO_ASYNC);
InitECapture();
// Blue LED on LaunchPad
GPIO_SetupPinMux(31, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(31, GPIO_OUTPUT, GPIO_PUSHPULL);
// Red LED on LaunchPad
GPIO_SetupPinMux(34, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(34, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBSET.bit.GPIO34 = 1;
// LED1 and PWM Pin
GPIO_SetupPinMux(22, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(22, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO22 = 1;
// LED2
GPIO_SetupPinMux(94, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(94, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPCCLEAR.bit.GPIO94 = 1;
// LED3
GPIO_SetupPinMux(95, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(95, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPCCLEAR.bit.GPIO95 = 1;
// LED4
GPIO_SetupPinMux(97, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(97, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPDCLEAR.bit.GPIO97 = 1;
// LED5
GPIO_SetupPinMux(111, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(111, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPDCLEAR.bit.GPIO111 = 1;
// LED6
GPIO_SetupPinMux(130, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(130, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO130 = 1;
// LED7
GPIO_SetupPinMux(131, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(131, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO131 = 1;
// LED8
GPIO_SetupPinMux(25, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(25, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO25 = 1;
// LED9
GPIO_SetupPinMux(26, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(26, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO26 = 1;
// LED10
GPIO_SetupPinMux(27, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(27, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO27 = 1;
// LED11
GPIO_SetupPinMux(60, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(60, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBCLEAR.bit.GPIO60 = 1;
// LED12
GPIO_SetupPinMux(61, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(61, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBCLEAR.bit.GPIO61 = 1;
// LED13
GPIO_SetupPinMux(157, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(157, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO157 = 1;
// LED14
GPIO_SetupPinMux(158, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(158, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO158 = 1;
// LED15
GPIO_SetupPinMux(159, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(159, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO159 = 1;
// LED16
GPIO_SetupPinMux(160, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(160, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPFCLEAR.bit.GPIO160 = 1;
//WIZNET Reset
GPIO_SetupPinMux(0, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(0, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO0 = 1;
//ESP8266 Reset
GPIO_SetupPinMux(1, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(1, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO1 = 1;
// //SPIRAM CS Chip Select
// GPIO_SetupPinMux(19, GPIO_MUX_CPU1, 0);
// GPIO_SetupPinOptions(19, GPIO_OUTPUT, GPIO_PUSHPULL);
// GpioDataRegs.GPASET.bit.GPIO19 = 1;
//DRV8874 #1 DIR Direction
GPIO_SetupPinMux(29, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(29, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO29 = 1;
//DRV8874 #2 DIR Direction
GPIO_SetupPinMux(32, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(32, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBSET.bit.GPIO32 = 1;
//DAN28027 CS Chip Select
GPIO_SetupPinMux(9, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(9, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO9 = 1;
//MPU9250 CS Chip Select
GPIO_SetupPinMux(66, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(66, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
//WIZNET CS Chip Select
GPIO_SetupPinMux(125, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(125, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPDSET.bit.GPIO125 = 1;
//PushButton 1
GPIO_SetupPinMux(4, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(4, GPIO_INPUT, GPIO_PULLUP);
//PushButton 2
GPIO_SetupPinMux(5, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(5, GPIO_INPUT, GPIO_PULLUP);
//PushButton 3
GPIO_SetupPinMux(6, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(6, GPIO_INPUT, GPIO_PULLUP);
//PushButton 4
GPIO_SetupPinMux(7, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(7, GPIO_INPUT, GPIO_PULLUP);
//Joy Stick Pushbutton
GPIO_SetupPinMux(8, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(8, GPIO_INPUT, GPIO_PULLUP);
GPIO_SetupPinMux(9, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(9, GPIO_INPUT, GPIO_PULLUP);
// Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
InitPieVectTable();
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this project
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.ADCD1_INT = &ADCD_ISR;
PieVectTable.TIMER0_INT = &cpu_timer0_isr;
PieVectTable.TIMER1_INT = &cpu_timer1_isr;
PieVectTable.TIMER2_INT = &cpu_timer2_isr;
PieVectTable.SCIA_RX_INT = &RXAINT_recv_ready;
PieVectTable.SCIC_RX_INT = &RXCINT_recv_ready;
PieVectTable.SCID_RX_INT = &RXDINT_recv_ready;
PieVectTable.SCIA_TX_INT = &TXAINT_data_sent;
PieVectTable.SCIC_TX_INT = &TXCINT_data_sent;
PieVectTable.SCID_TX_INT = &TXDINT_data_sent;
PieVectTable.SPIB_RX_INT = &SPIB_isr;
PieVectTable.EMIF_ERROR_INT = &SWI_isr;
PieVectTable.ECAP1_INT = &ecap1_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
// Initialize the CpuTimers Device Peripheral. This function can be
// found in F2837xD_CpuTimers.c
InitCpuTimers();
// Configure CPU-Timer 0, 1, and 2 to interrupt every second:
// 200MHz CPU Freq, Period (in uSeconds)
ConfigCpuTimer(&CpuTimer0, LAUNCHPAD_CPU_FREQUENCY, 1000);//Timer 0 set to 1 ms
ConfigCpuTimer(&CpuTimer1, LAUNCHPAD_CPU_FREQUENCY, 20000);
ConfigCpuTimer(&CpuTimer2, LAUNCHPAD_CPU_FREQUENCY, 4000);
// Enable CpuTimer Interrupt bit TIE
CpuTimer0Regs.TCR.all = 0x4000;
CpuTimer1Regs.TCR.all = 0x4000;
CpuTimer2Regs.TCR.all = 0x4000;
init_serial(&SerialA,115200,serialRXA);
init_serial(&SerialC,115200,serialRXC);
//EPWM 2 register settings
EPwm2Regs.TBCTL.bit.CTRMODE = 0;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3;
EPwm2Regs.TBCTL.bit.PHSEN = 0;
EPwm2Regs.TBCTL.bit.CLKDIV = 0;
EPwm2Regs.TBCTR = 0;
EPwm2Regs.TBPRD = 2500;
EPwm2Regs.CMPA.bit.CMPA = 1250;
EPwm2Regs.AQCTLA.bit.ZRO= 2;
EPwm2Regs.AQCTLA.bit.CAU= 1;
EPwm2Regs.TBPHS.bit.TBPHS=0;
EPwm2Regs.TBCTR = 0x0;
//2A pinout
GPIO_SetupPinMux(2, GPIO_MUX_CPU1, 1);
//2B pinout
GPIO_SetupPinMux(3, GPIO_MUX_CPU1, 1);
EPwm2Regs.CMPB.bit.CMPB = 1250;
EPwm2Regs.AQCTLB.bit.CBU= 1;
EPwm2Regs.AQCTLB.bit.ZRO= 2;
EALLOW; // Below are protected registers
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1; // For EPWM2A
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1; // For EPWM2B
EDIS;
//Lab4 code to set up timer using EPwm 5
EALLOW;
EPwm5Regs.ETSEL.bit.SOCAEN = 0; // Disable SOC on A group
EPwm5Regs.TBCTL.bit.CTRMODE = 3; // freeze counter
EPwm5Regs.ETSEL.bit.SOCASEL = 2; // Select Event when counter equal to PRD
EPwm5Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event (“pulse” is the same as “trigger”)
EPwm5Regs.TBCTR = 0x0; // Clear counter
EPwm5Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm5Regs.TBCTL.bit.PHSEN = 0; // Disable phase loading
EPwm5Regs.TBCTL.bit.CLKDIV = 0; // divide by 1 50Mhz Clock
//EPwm5Regs.TBPRD = 50000; // Set Period to 1ms sample. Input clock is 50MHz.//ex 1,2,3
// EPwm5Regs.TBPRD = 12500;//0.25ms
EPwm5Regs.TBPRD = 5000;//part4 of ex4
// Notice here that we are not setting CMPA or CMPB because we are not using the PWM signal
EPwm5Regs.ETSEL.bit.SOCAEN = 1; //enable SOCA
EPwm5Regs.TBCTL.bit.CTRMODE = 0; //unfreeze, and enter up count mode
EDIS;
EALLOW;
//ADC1 setup
AdcdRegs.ADCCTL2.bit.PRESCALE = 6; //set ADCCLK divider to /4
AdcSetMode(ADC_ADCD, ADC_RESOLUTION_12BIT, ADC_SIGNALMODE_SINGLE); //read calibration settings
AdcdRegs.ADCCTL1.bit.INTPULSEPOS = 1;
AdcdRegs.ADCCTL1.bit.ADCPWDNZ = 1;
//delay for 1ms to allow ADC time to power up
DELAY_US(1000);
//ADCD
AdcdRegs.ADCSOC0CTL.bit.CHSEL = 0; // set SOC0 to convert pin D0
AdcdRegs.ADCSOC0CTL.bit.ACQPS = 99; //sample window is acqps + 1 SYSCLK cycles = 500ns
AdcdRegs.ADCSOC0CTL.bit.TRIGSEL = 13; // EPWM5 ADCSOCA will trigger SOC0
AdcdRegs.ADCSOC1CTL.bit.CHSEL = 1; //set SOC1 to convert pin D1
AdcdRegs.ADCSOC1CTL.bit.ACQPS = 99; //sample window is acqps + 1 SYSCLK cycles = 500ns
AdcdRegs.ADCSOC1CTL.bit.TRIGSEL = 13; // EPWM5 ADCSOCA will trigger SOC1
AdcdRegs.ADCINTSEL1N2.bit.INT1SEL = 1 ; //set to SOC1, the last converted, and it will set INT1 flag ADCD1
AdcdRegs.ADCINTSEL1N2.bit.INT1E = 1; //enable INT1 flag
AdcdRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //make sure INT1 flag is cleared
EDIS;
init_serial(&SerialC,115200,serialRXC);
// init_serial(&SerialD,115200,serialRXD);
setupSpib(); //Call this function in main() somewhere after the DINT; line of code.
init_eQEPs();
// Enable CPU int1 which is connected to CPU-Timer 0, CPU int13
// which is connected to CPU-Timer 1, and CPU int 14, which is connected
// to CPU-Timer 2: int 12 is for the SWI.
IER |= M_INT1;
IER |= M_INT4; // Enable CPU INT4 which is connected to ECAP1-4 INT
IER |= M_INT8; // SCIC SCID
IER |= M_INT9; // SCIA
IER |= M_INT12;
IER |= M_INT13;
IER |= M_INT14;
IER |= M_INT6; //SPIB
// Enable eCAP INT1 in the PIE: Group 4 interrupt 1
PieCtrlRegs.PIEIER4.bit.INTx1 = 1;
// Enable TINT0 in the PIE: Group 1 interrupt 7
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
//enabling ADCD
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
// Enable SWI in the PIE: Group 12 interrupt 9
PieCtrlRegs.PIEIER12.bit.INTx9 = 1;
// Enable SPIB in the PIE: Group 6 interrupt 3
PieCtrlRegs.PIEIER6.bit.INTx3 =1;
// Enable global Interrupts and higher priority real-time debug events
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
// IDLE loop. Just sit and loop forever (optional):
while(1)
{
if (UARTPrintA == 1 ) {
sscanf(buff,"%f %f",&turn,&speed_control); //Scan the buff array from LabView to piece together the turnref value to turn the robot
UARTPrintA = 0;
}
if (UARTPrintC == 1) {
serial_printf(&SerialC,"*%.4f %.4f#",sendfloat1,sendfloat2); //Send x and y coordinates of the robot to Labview through MyRio
UARTPrintC = 0;
}
}
}
// SWI_isr, Using this interrupt as a Software started interrupt
__interrupt void SWI_isr(void) {
// These three lines of code allow SWI_isr, to be interrupted by other interrupt functions
// making it lower priority than all other Hardware interrupts.
PieCtrlRegs.PIEACK.all = PIEACK_GROUP12;
asm(" NOP"); // Wait one cycle
EINT; // Clear INTM to enable interrupts
// Insert SWI ISR Code here.......
numSWIcalls++;
DINT;
}
__interrupt void SPIB_isr(void){
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
dummy = SpibRegs.SPIRXBUF;
accelXraw = SpibRegs.SPIRXBUF;
accelYraw= SpibRegs.SPIRXBUF;
accelZraw = SpibRegs.SPIRXBUF;
dummy2 = SpibRegs.SPIRXBUF;
gyroXraw= SpibRegs.SPIRXBUF;
gyroYraw = SpibRegs.SPIRXBUF;
gyroZraw = SpibRegs.SPIRXBUF;
gyroXReading = gyroXraw*250.0/32767.0;
gyroYReading = gyroYraw*250.0/32767.0;
gyroZReading = gyroZraw*250.0/32767.0;
accelXReading = accelXraw*4.0/32767.0;
accelYReading = accelYraw*4.0/32767.0;
accelZReading = accelZraw*4.0/32767.0;
SpibRegs.SPIFFRX.bit.RXFFOVFCLR=1; // Clear Overflow flag
SpibRegs.SPIFFRX.bit.RXFFINTCLR=1; // Clear Interrupt flag
PieCtrlRegs.PIEACK.all = PIEACK_GROUP6;
}
// cpu_timer0_isr - CPU Timer0 ISR
__interrupt void cpu_timer0_isr(void)
{
if ((CpuTimer0.InterruptCount % 0) == 0) {
UARTPrintC = 1; //for ex4
}
if ((numTimer0calls%250) == 0) {
displayLEDletter(LEDdisplaynum);
LEDdisplaynum++;
if (LEDdisplaynum == 0xFFFF) { // prevent roll over exception
LEDdisplaynum = 0;
}
}
// Blink LaunchPad Red LED
GpioDataRegs.GPBTOGGLE.bit.GPIO34 = 1;
// Acknowledge this interrupt to receive more interrupts from group 1
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
// cpu_timer1_isr - CPU Timer1 ISR
__interrupt void cpu_timer1_isr(void)
{
CpuTimer1.InterruptCount++;
}
// cpu_timer2_isr CPU Timer2 ISR
__interrupt void cpu_timer2_isr(void)
{
CpuTimer2.InterruptCount++;
LeftWheel = readEncLeft();
RightWheel = readEncRight();
IR_read = (float)adcd0result;
Dist_ultra= echo_distance;
LeftD = (LeftWheel* 0.06/0.3048);
RightD = (RightWheel* 0.06/0.3048);
Posleft_K = LeftD;
Posright_K = RightD;
VLeftK = (Posleft_K - Posleft_K_1)/0.004;
VRightK = (Posright_K - Posright_K_1)/0.004;
theta_r = RightWheel;
theta_l = LeftWheel;
phi_r = (R/w)*(theta_r-theta_l);
theta_avg = (theta_l +theta_r)/2;
theta_dot_avg= (VLeftK +VRightK)/(2*0.19685);
x_dot_r= R * theta_dot_avg*cos(phi_r);
y_dot_r= R * theta_dot_avg*sin(phi_r);
x_r = x_r + (x_dot_r_1+x_dot_r)*0.004/(2);
y_r = y_r + (y_dot_r_1+y_dot_r)*0.004/(2);
sendfloat1 = x_r; //x coordinate
sendfloat2 = y_r; // y coordinate
Vref = speed_control; //initial velocity maintained by robot which is set in LabView
// code to make sure the robot speeds up when loses sight of the front robot
// if (free = 1){
// Vref = 0;
// } else{
// Vref = 0.25;
// }
// if (turn_c <thresh){
// k= k+1;
// }
// if (k>10){
// turn = -0.4;
// }else{
// turn = turn_c;
// k =0;
// }
// Steering Control
Eturn = turn + VLeftK - VRightK;
ELeft_K = Vref - VLeftK - Kp*Eturn;
ILeft_K = ILeft_K_1 + 0.004*((ELeft_K+ELeft_K_1)/2);
ULeft_K = Kp*ELeft_K + Ki*ILeft_K;
ERight_K = Vref - VRightK+ Kp*Eturn;
IRight_K = IRight_K_1 + 0.004*((ERight_K+ERight_K_1)/2);
URight_K = Kp*ERight_K + Ki*IRight_K;
//Setting attributes to the motors
setEPWM2B(ULeft_K);
setEPWM2A(-URight_K);
if(fabs(ULeft_K)> 10){
ILeft_K = ILeft_K_1;
}
if(fabs(URight_K)> 10){
IRight_K = IRight_K_1;
}
//Updating values with previous state
ILeft_K_1 = ILeft_K;
IRight_K_1 = IRight_K;
ELeft_K_1 = ELeft_K;
ERight_K_1 = ERight_K;
Posleft_K_1 = Posleft_K;
Posright_K_1 = Posright_K;
x_dot_r_1 =x_dot_r;
y_dot_r_1 =y_dot_r;
}
// This function is called each time a char is received over UARTA.
//This function handles steering of the robot in case of control required
void serialRXA(serial_t *s, char data) {
numRXA ++;
// This function is called each time a char is recieved over UARTA.
if (data == 'q') {
turn = turn + 0.05;
} else if (data == 'r') {
turn = turn - 0.05;
} else if (data == '3') {
Vref = Vref + 0.1;
} else if (data == 'w') {
Vref = 0;
}else if (data == 'a') {
Vref =0;
turn = turn + 0.05;
}else if (data == 'd') {
Vref = 0;
turn = turn - 0.05;
}else {
turn = 0;
Vref = 0.5;
}
}
// This function sends data through UART from the MyRio to the Red Board
void serialRXC(serial_t *s, char data) {
numRXC ++;
if (com_state == 0) {
if (data == '*') {
com_state = 1;
...
This file has been truncated, please download it to see its full contents.
//#############################################################################
// FILE: labstarter_main.c
//
// TITLE: Lab Starter
//#############################################################################
// Included Files
#include <stdio.h>
#include <stdlib.h>
#include <stdarg.h>
#include <string.h>
#include <math.h>
#include <limits.h>
#include "F28x_Project.h"
#include "driverlib.h"
#include "device.h"
#include "f28379dSerial.h"
#include "LEDPatterns.h"
#include "song.h"
#include "dsp.h"
#include "fpu32/fpu_rfft.h"
#define PI 3.1415926535897932384626433832795
#define TWOPI 6.283185307179586476925286766559
#define HALFPI 1.5707963267948966192313216916398
// The Launchpad's CPU Frequency set to 200 you should not change this value
#define LAUNCHPAD_CPU_FREQUENCY 200
#define TIMEBASE 0.005 // 1.0/200
// Interrupt Service Routines predefinition
__interrupt void cpu_timer0_isr(void);
__interrupt void cpu_timer1_isr(void);
__interrupt void cpu_timer2_isr(void);
__interrupt void SWI_isr(void);
__interrupt void SPIB_isr(void);
__interrupt void ADCD_ISR(void);
void serialRXA(serial_t *s, char data);
void serialRXC(serial_t *s, char data);
void setup_led_GPIO(void);
// Count variables
uint32_t numTimer0calls = 0;
uint32_t numSWIcalls = 0;
uint32_t numRXA = 0;
uint16_t UARTPrintC = 0;
uint16_t LEDdisplaynum = 0;
int16_t spivalue1 = 0;
int16_t spivalue2 = 0;
int16_t spivalue3 = 0;
uint16_t updown = 0;
int16_t c = 0;
int16_t c2 = 0;
int16_t temp = 0;
int16_t temp1 =0;
int16_t temp2 = 0;
float x = 0;
float y = 0;
int16_t dummy= 0;
int16_t accelXraw = 0;
int16_t accelYraw = 0;
int16_t accelZraw = 0;
int16_t dummy2 = 0;
int16_t gyroXraw = 0;
int16_t gyroYraw = 0;
int16_t gyroZraw = 0;
//int16_t temp = 0;
float LeftWheel = 0;
float RightWheel = 0;
float accelXReading=0.0;
float accelYReading=0.0;
float accelZReading=0.0;
float gyroXReading=0.0;
float gyroYReading=0.0;
float gyroZReading=0.0;
float LeftD = 0;
float RightD = 0;
float uLeft = 0.0;
float uRight = 0.0;
float Posleft_K=0;
float Posleft_K_1=0;
float Posright_K = 0;
float Posright_K_1 = 0;
float VLeftK = 0;
float VRightK = 0;
float Vref = 0.5;
float Ki = 25.0;
float Kp = 3.0;
float ELeft_K = 0;
float ELeft_K_1 = 0;
float ERight_K =0;
float ERight_K_1 = 0;
float ILeft_K = 0;
float ILeft_K_1 = 0;
float IRight_K =0;
float IRight_K_1 = 0;
float ULeft_K =0;
float URight_K =0;
float Eturn = 0;
float turn = 0;
float R = 0.19685;
float w = 0.57743;
float theta_r = 0.0;
float theta_l = 0.0;
float theta_avg = 0.0;
float VLeftK_1 = 0.0;
float VRightK_1 = 0.0;
float phi_r = 0.0;
float theta_dot_avg= 0.0;
float x_dot_r= 0;
float y_dot_r= 0;
float x_dot_r_1= 0;
float y_dot_r_1= 0;
float y_r = 0;
float x_r = 0;
uint32_t echo_count = 0;
float echo_duration = 0;
float echo_distance = 0;
uint16_t trigger_count = 0;
uint16_t trigger_state = 0;
int16_t UARTPrintA = 0;
int16_t com_state = 0;
char buff[100];
int16_t buffindex = 0;
float sendfloat1 = 0;
float sendfloat2 = 0;
float yk = 0;
float IR_ref = 3000; //(to be compared with the raw IR reading)(The higher it is, the closer we are)
float IR_read = 0;
float Kp_ir = 0.0002 ;
float Ki_ir = 25 ;
float Dist_ultra = 0 ;
float turnUltra= 1.5;
int16_t adcd0result =0; //ADCIND0 raw reading. Used to store IR sensor readings.
int16_t adcd1result =0;
int16_t c1 =0;
int16_t cU =9;
float rightWallFollow = 1;
float ref_ultra = 1000;
float threshold1 = 30;
float threshold2 = 100;
float Kp_ultra = 0.01;
uint32_t numRXC = 0;
float Vref1= 0.0;
float WFConstant= 1;
float turn_sat= 3.0;
float IR_read_Front=0;
float IR_ref1 = 2000;
float c12= 5;
// variables below are read from labview.This is their initialization
float num1= 0;
float num2= 0;
float num3= 0;
float num4= 0;
float num5= 0;
float num6= 0;
float num7=0;
float num8= 0;
float num9= 0;
float num10=0;
//Vref = num1;
// Vref1= num2;
// Kp_ir = num3 ;
// Kp_ultra = num4 ;
// IR_ref= num5;
// ref_ultra= num6;
// turn_sat= num7;
// WFconstant= num8;
// threshold1 = num9;
// threshold2= num10;
float correction = 0.8;
int32_t raw1 = 0;
int32_t corn =1;
int32_t Flag =1;
void setupSpib(void){
//Step 1.
// cut and paste here all the SpibRegs initializations you found for part 3. Make sure the TXdelay in
// between each transfer to 0. Also dont forget to cut and paste the GPIO settings for GPIO9, 63, 64, 65,
// 66 which are also a part of the SPIB setup.
GPIO_SetupPinMux(9, GPIO_MUX_CPU1, 0); // Set as GPIO9 and used as DAN28027 SS
GPIO_SetupPinOptions(9, GPIO_OUTPUT, GPIO_PUSHPULL); // Make GPIO9 an Output Pin
GpioDataRegs.GPASET.bit.GPIO9 = 1; //Initially Set GPIO9/SS High so DAN28027 is not selected
GPIO_SetupPinMux(66, GPIO_MUX_CPU1, 0); // Set as GPIO66 and used as MPU-9250 SS
GPIO_SetupPinOptions(66, GPIO_OUTPUT, GPIO_PUSHPULL); // Make GPIO66 an Output Pin
GpioDataRegs.GPCSET.bit.GPIO66 = 1; //Initially Set GPIO66/SS High so MPU-9250 is not selected
GPIO_SetupPinMux(63, GPIO_MUX_CPU1, 15); //Set GPIO63 pin to SPISIMOB
GPIO_SetupPinMux(64, GPIO_MUX_CPU1, 15); //Set GPIO64 pin to SPISOMIB
GPIO_SetupPinMux(65, GPIO_MUX_CPU1, 15); //Set GPIO65 pin to SPICLKB
EALLOW;
//GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1; // For EPWM2A
//GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1; // For EPWM2B
GpioCtrlRegs.GPBPUD.bit.GPIO63 = 0; // Enable Pull-ups on SPI PINs Recommended by TI for SPI Pins
GpioCtrlRegs.GPCPUD.bit.GPIO64 = 0;
GpioCtrlRegs.GPCPUD.bit.GPIO65 = 0;
GpioCtrlRegs.GPBQSEL2.bit.GPIO63 = 3; // Set I/O pin to asynchronous mode recommended for SPI
GpioCtrlRegs.GPCQSEL1.bit.GPIO64 = 3; // Set I/O pin to asynchronous mode recommended for SPI
GpioCtrlRegs.GPCQSEL1.bit.GPIO65 = 3; // Set I/O pin to asynchronous mode recommended for SPI
EDIS;
// ---------------------------------------------------------------------------
SpibRegs.SPICCR.bit.SPISWRESET = 0; // Put SPI in Reset
SpibRegs.SPICTL.bit.CLK_PHASE = 1; //This happens to be the mode for both the DAN28027 and
SpibRegs.SPICCR.bit.CLKPOLARITY = 0; //The MPU-9250, Mode 01.
SpibRegs.SPICTL.bit.MASTER_SLAVE = 1; // Set to SPI Master
SpibRegs.SPICCR.bit.SPICHAR = 15; // Set to transmit and receive 16 bits each write to SPITXBUF
SpibRegs.SPICTL.bit.TALK = 1; // Enable transmission
SpibRegs.SPIPRI.bit.FREE = 1; // Free run, continue SPI operation
SpibRegs.SPICTL.bit.SPIINTENA = 0; // Disables the SPI interrupt
SpibRegs.SPIBRR.bit.SPI_BIT_RATE = 49 ; // Set SCLK bit rate to 1 MHz so 1us period. SPI base clock is
// 50MHZ. And this setting divides that base clock to create SCLKs period
SpibRegs.SPISTS.all = 0x0000; // Clear status flags just in case they are set for some reason
SpibRegs.SPIFFTX.bit.SPIRST = 1;// Pull SPI FIFO out of reset, SPI FIFO can resume transmit or receive.
SpibRegs.SPIFFTX.bit.SPIFFENA = 1; // Enable SPI FIFO enhancements
SpibRegs.SPIFFTX.bit.TXFIFO = 0; // Write 0 to reset the FIFO pointer to zero, and hold in reset
SpibRegs.SPIFFTX.bit.TXFFINTCLR = 1; // Write 1 to clear SPIFFTX[TXFFINT] flag just in case it is set
SpibRegs.SPIFFRX.bit.RXFIFORESET = 0; // Write 0 to reset the FIFO pointer to zero, and hold in reset
SpibRegs.SPIFFRX.bit.RXFFOVFCLR = 1; // Write 1 to clear SPIFFRX[RXFFOVF] just in case it is set
SpibRegs.SPIFFRX.bit.RXFFINTCLR = 1; // Write 1 to clear SPIFFRX[RXFFINT] flag just in case it is set
SpibRegs.SPIFFRX.bit.RXFFIENA = 1; // Enable the RX FIFO Interrupt. RXFFST >= RXFFIL
SpibRegs.SPIFFCT.bit.TXDLY = 0; //Set delay between transmits to 16 spi clocks. Needed by DAN28027 chip //changed from 16 in ex3 to 0 on ex 4
SpibRegs.SPICCR.bit.SPISWRESET = 1; // Pull the SPI out of reset
SpibRegs.SPIFFTX.bit.TXFIFO = 1; // Release transmit FIFO from reset.
SpibRegs.SPIFFRX.bit.RXFIFORESET = 1; // Re-enable receive FIFO operation
SpibRegs.SPICTL.bit.SPIINTENA = 1; // Enables SPI interrupt. !! I dont think this is needed. Need to Test
//SpibRegs.SPIFFRX.bit.RXFFIL =16; //Interrupt Level to 16 words or more received into FIFO causes interrupt. This is just the initial setting for the register. Will be changed below
SpibRegs.SPIFFRX.bit.RXFFIL = 8 ; //changed for ex4
SpibRegs.SPICCR.bit.SPICHAR = 0xF;
SpibRegs.SPIFFCT.bit.TXDLY = 0x00;
//Step 2.
// perform a multiple 16 bit transfer to initialize MPU-9250 registers 0x13,0x14,0x15,0x16
// 0x17, 0x18, 0x19, 0x1A, 0x1B, 0x1C 0x1D, 0x1E, 0x1F. Use only one SS low to high for all these writes
// some code is given, most you have to fill you yourself.
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1; // Slave Select Low
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2837xD_PieCtrl.c file.
// Perform the number of needed writes to SPITXBUF to write to all 13 registers. Remember we are
//sending 16 bit transfers, so two registers at a time after the first 16 bit transfer.
// To address 00x13 write 0x00
SpibRegs.SPITXBUF = (0x1300|0x0000);
// To address 00x14 write 0x00 || To address 00x15 write 0x00
SpibRegs.SPITXBUF = (0x0000|0x0000);
// To address 00x16 write 0x00 // To address 00x17 write 0x00
SpibRegs.SPITXBUF = (0x0000|0x0000);
// To address 00x18 write 0x00 // To address 00x19 write 0x13
SpibRegs.SPITXBUF = (0x0000|0x0013);
// To address 00x1A write 0x02 // To address 00x1B write 0x00
SpibRegs.SPITXBUF = (0x0002| 0x0000);
// To address 00x1C write 0x08 // To address 00x1D write 0x06
SpibRegs.SPITXBUF = ( 0x0008 | 0x0006);
// To address 00x1E write 0x00 // To address 00x1F write 0x00
SpibRegs.SPITXBUF = (0x0000|0x0000);
// wait for the correct number of 16 bit values to be received into the RX FIFO
while(SpibRegs.SPIFFRX.bit.RXFFST != 7);
GpioDataRegs.GPCSET.bit.GPIO66 = 1; // Slave Select High
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
// ???? read the additional number of garbage receive values off the RX FIFO to clear out the RX FIFO
DELAY_US(10); // Delay 10us to allow time for the MPU-2950 to get ready for next transfer.
//Step 3.
// perform a multiple 16 bit transfer to initialize MPU-9250 registers 0x23,0x24,0x25,0x26
// 0x27, 0x28, 0x29. Use only one SS low to high for all these writes
// some code is given, most you have to fill you yourself.
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1; // Slave Select Low
// Perform the number of needed writes to SPITXBUF to write to all 7 registers
SpibRegs.SPITXBUF = (0x2300|0x0000);
// To address 00x23 write 0x00
// To address 00x24 write 0x40
// To address 00x25 write 0x8C
SpibRegs.SPITXBUF = (0x4000|0x008C);
// To address 00x26 write 0x02
// To address 00x27 write 0x88
SpibRegs.SPITXBUF = (0x0200|0x0088);
// To address 00x28 write 0x0C
// To address 00x29 write 0x0A
SpibRegs.SPITXBUF = (0x0C00|0x000A);
// wait for the correct number of 16 bit values to be received into the RX FIFO
while(SpibRegs.SPIFFRX.bit.RXFFST !=4);
GpioDataRegs.GPCSET.bit.GPIO66 = 1; // Slave Select High
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
temp = SpibRegs.SPIRXBUF;
// ???? read the additional number of garbage receive values off the RX FIFO to clear out the RX FIFO
DELAY_US(10); // Delay 10us to allow time for the MPU-2950 to get ready for next transfer.
//Step 4.
// perform a single 16 bit transfer to initialize MPU-9250 register 0x2A
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
// Write to address 0x2A the value 0x81
SpibRegs.SPITXBUF = (0x2A00|0x0081);
// wait for one byte to be received
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x3800 | 0x0001); // 0x3800
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x3A00 | 0x0001); // 0x3A00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6400 | 0x0001); // 0x6400
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6700 | 0x0003); // 0x6700
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6A00 | 0x0020); // 0x6A00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x6B00 | 0x0001); // 0x6B00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7500 | 0x0071); // 0x7500
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7700 | 0x00E1); // 0x7700 0x00EB
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7800 | 0x00CC); // 0x7800
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7A00 | 0x00F3); // 0x7A00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7B00 | 0x00FE); // 0x7B00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7D00 | 0x001C); // 0x7D00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(10);
GpioDataRegs.GPCCLEAR.bit.GPIO66 = 1;
SpibRegs.SPITXBUF = (0x7E00 | 0x00E0); // 0x7E00
while(SpibRegs.SPIFFRX.bit.RXFFST !=1);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
temp = SpibRegs.SPIRXBUF;
DELAY_US(50);
// Clear SPIB interrupt source just in case it was issued due to any of the above initializations.
SpibRegs.SPIFFRX.bit.RXFFOVFCLR=1; // Clear Overflow flag
SpibRegs.SPIFFRX.bit.RXFFINTCLR=1; // Clear Interrupt flag
PieCtrlRegs.PIEACK.all = PIEACK_GROUP6;
}
//Lab 6
void init_eQEPs(void) {
// setup eQEP1 pins for input
EALLOW;
//Disable internal pull-up for the selected output pins for reduced power consumption
GpioCtrlRegs.GPAPUD.bit.GPIO20 = 1; // Disable pull-up on GPIO20 (EQEP1A)
GpioCtrlRegs.GPAPUD.bit.GPIO21 = 1; // Disable pull-up on GPIO21 (EQEP1B)
GpioCtrlRegs.GPAQSEL2.bit.GPIO20 = 2; // Qual every 6 samples
GpioCtrlRegs.GPAQSEL2.bit.GPIO21 = 2; // Qual every 6 samples
EDIS;
// This specifies which of the possible GPIO pins will be EQEP1 functional pins.
// Comment out other unwanted lines.
GPIO_SetupPinMux(20, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(21, GPIO_MUX_CPU1, 1);
EQep1Regs.QEPCTL.bit.QPEN = 0; // make sure eqep in reset
EQep1Regs.QDECCTL.bit.QSRC = 0; // Quadrature count mode
EQep1Regs.QPOSCTL.all = 0x0; // Disable eQep Position Compare
EQep1Regs.QCAPCTL.all = 0x0; // Disable eQep Capture
EQep1Regs.QEINT.all = 0x0; // Disable all eQep interrupts
EQep1Regs.QPOSMAX = 0xFFFFFFFF; // use full range of the 32 bit count
EQep1Regs.QEPCTL.bit.FREE_SOFT = 2; // EQep uneffected by emulation suspend in Code Composer
EQep1Regs.QPOSCNT = 0;
EQep1Regs.QEPCTL.bit.QPEN = 1; // Enable EQep
// setup QEP2 pins for input
EALLOW;
//Disable internal pull-up for the selected output pinsfor reduced power consumption
GpioCtrlRegs.GPBPUD.bit.GPIO54 = 1; // Disable pull-up on GPIO54 (EQEP2A)
GpioCtrlRegs.GPBPUD.bit.GPIO55 = 1; // Disable pull-up on GPIO55 (EQEP2B)
GpioCtrlRegs.GPBQSEL2.bit.GPIO54 = 2; // Qual every 6 samples
GpioCtrlRegs.GPBQSEL2.bit.GPIO55 = 2; // Qual every 6 samples
EDIS;
GPIO_SetupPinMux(54, GPIO_MUX_CPU1, 5); // set GPIO54 and eQep2A
GPIO_SetupPinMux(55, GPIO_MUX_CPU1, 5); // set GPIO54 and eQep2B
EQep2Regs.QEPCTL.bit.QPEN = 0; // make sure qep reset
EQep2Regs.QDECCTL.bit.QSRC = 0; // Quadrature count mode
EQep2Regs.QPOSCTL.all = 0x0; // Disable eQep Position Compare
EQep2Regs.QCAPCTL.all = 0x0; // Disable eQep Capture
EQep2Regs.QEINT.all = 0x0; // Disable all eQep interrupts
EQep2Regs.QPOSMAX = 0xFFFFFFFF; // use full range of the 32 bit count.
EQep2Regs.QEPCTL.bit.FREE_SOFT = 2; // EQep uneffected by emulation suspend
EQep2Regs.QPOSCNT = 0;
EQep2Regs.QEPCTL.bit.QPEN = 1; // Enable EQep
}
float readEncLeft(void) {
int32_t raw = 0;
raw1= raw;
uint32_t QEP_maxvalue = 0xFFFFFFFFU; //4294967295U
raw = EQep1Regs.QPOSCNT;
if (raw >= QEP_maxvalue/2) raw -= QEP_maxvalue; // I don't think this is needed and never true
// 5 North South magnet poles in the encoder disk so 5 square waves per one revolution of the
// DC motor's back shaft. Then Quadrature Decoder mode multiplies this by 4 so 20 counts per one rev
// of the DC motor's back shaft. Then the gear motor's gear ratio is 30:1.
return (raw*2*(-22.0/7.0)/600.0);
}
float readEncRight(void) {
int32_t raw = 0;
uint32_t QEP_maxvalue = 0xFFFFFFFFU; //4294967295U -1 32bit signed int
raw = EQep2Regs.QPOSCNT;
if (raw >= QEP_maxvalue/2) raw -= QEP_maxvalue; // I don't think this is needed and never true
// 5 North South magnet poles in the encoder disk so 5 square waves per one revolution of the
// DC motor's back shaft. Then Quadrature Decoder mode multiplies this by 4 so 20 counts per one rev
// of the DC motor's back shaft. Then the gear motor's gear ratio is 30:1.
return (raw*2*(22.0/7.0)/600.0);
}
float saturate(float input, float saturation_limit) {
//first if statement checks if input is a positive number and greater than saturation limit value and if so returns saturation_limit value
if ((input>0)& (input > saturation_limit)){
return saturation_limit;
}
//second if statement checks if input is a negative number with magnitude greater than saturation limit value and if so returns the negative of saturation_limit value
if ((input<0) & (input < -(saturation_limit))){
return (-saturation_limit);
}
// if the code reaches here while running, that means input is between saturation_limit value and -saturation_limit value.
return input;
}
//Lab6 Ex2 Epwm2A and 2B functions
void setEPWM2A(float controleffort){
temp1 = saturate(controleffort,10);
c = temp1*125+1250;
EPwm2Regs.CMPA.bit.CMPA = c;
}
void setEPWM2B(float controleffort){
temp2 = saturate(controleffort,10);
c2 = temp2*125+1250;
EPwm2Regs.CMPB.bit.CMPB = c2;
}
void hc_sr04_trigger(void) {
if (trigger_count < 2) {
if (trigger_state == 0) {
// last for 2ms
GpioDataRegs.GPACLEAR.bit.GPIO0 = 1;
trigger_state = 1;
}
trigger_count++;
} else if ( (trigger_count >= 2) && (trigger_count < 11) ) {
// last for 10ms
if (trigger_state == 1) {
GpioDataRegs.GPASET.bit.GPIO0 = 1;
trigger_state = 2;
}
trigger_count++;
} else {
if (trigger_state == 2) {
trigger_count = 0;
trigger_state = 0;
}
}
}
// InitECapture - Initialize ECAP1 configurations
void InitECapture() {
EALLOW;
DevCfgRegs.SOFTPRES3.bit.ECAP1 = 1; // eCAP1 is reset
DevCfgRegs.SOFTPRES3.bit.ECAP1 = 0; // eCAP1 is released from reset
EDIS;
ECap1Regs.ECEINT.all = 0; // Disable all eCAP interrupts
ECap1Regs.ECCTL1.bit.CAPLDEN = 0; // Disabled loading of capture results
ECap1Regs.ECCTL2.bit.TSCTRSTOP = 0; // Stop the counter
ECap1Regs.TSCTR = 0; // Clear the counter
ECap1Regs.CTRPHS = 0; // Clear the counter phase register
// ECAP control register 2
ECap1Regs.ECCTL2.all = 0x0096;
// bit 15-11 00000: reserved
// bit 10 0: APWMPOL, don't care
// bit 9 0: CAP/APWM, 0 = capture mode, 1 = APWM mode
// bit 8 0: SWSYNC, 0 = no action (no s/w synch)
// bit 7-6 10: SYNCO_SEL, 10 = disable sync out signal
// bit 5 0: SYNCI_EN, 0 = disable Sync-In
// bit 4 1: TSCTRSTOP, 1 = enable counter
// bit 3 0: RE-ARM, 0 = don't re-arm, 1 = re-arm
// bit 2-1 11: STOP_WRAP, 11 = wrap after 4 captures
// bit 0 0: CONT/ONESHT, 0 = continuous mode
// ECAP control register 1
ECap1Regs.ECCTL1.all = 0xC144;
// bit 15-14 11: FREE/SOFT, 11 = ignore emulation suspend
// bit 13-9 00000: PRESCALE, 00000 = divide by 1
// bit 8 1: CAPLDEN, 1 = enable capture results load
// bit 7 0: CTRRST4, 0 = do not reset counter on CAP4 event
// bit 6 1: CAP4POL, 0 = rising edge, 1 = falling edge
// bit 5 0: CTRRST3, 0 = do not reset counter on CAP3 event
// bit 4 0: CAP3POL, 0 = rising edge, 1 = falling edge
// bit 3 0: CTRRST2, 0 = do not reset counter on CAP2 event
// bit 2 1: CAP2POL, 0 = rising edge, 1 = falling edge
// bit 1 0: CTRRST1, 0 = do not reset counter on CAP1 event
// bit 0 0: CAP1POL, 0 = rising edge, 1 = falling edge
// Enable desired eCAP interrupts
ECap1Regs.ECEINT.all = 0x0008;
// bit 15-8 0's: reserved
// bit 7 0: CTR=CMP, 0 = compare interrupt disabled
// bit 6 0: CTR=PRD, 0 = period interrupt disabled
// bit 5 0: CTROVF, 0 = overflow interrupt disabled
// bit 4 0: CEVT4, 0 = event 4 interrupt disabled
// bit 3 1: CEVT3, 1 = event 3 interrupt enabled
// bit 2 0: CEVT2, 0 = event 2 interrupt disabled
// bit 1 0: CEVT1, 0 = event 1 interrupt disabled
// bit 0 0: reserved
}
__interrupt void ecap1_isr(void);
// IR sensor 4095 corresponds to 6.5cm
void main(void)
{
// 2A
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
InitSysCtrl();
InitGpio();
setup_led_GPIO();
//---------------------------------------------------------
// Trigger pin for HC-SR04
GPIO_SetupPinMux(0, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(0, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO0 = 1;
// Echo pin for HC-SR04
EALLOW;
InputXbarRegs.INPUT7SELECT = 19; // Set eCAP1 source to GPIO-pin
EDIS;
GPIO_SetupPinOptions(19, GPIO_INPUT, GPIO_ASYNC);
InitECapture();
// Blue LED on LaunchPad
GPIO_SetupPinMux(31, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(31, GPIO_OUTPUT, GPIO_PUSHPULL);
// Red LED on LaunchPad
GPIO_SetupPinMux(34, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(34, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBSET.bit.GPIO34 = 1;
// LED1 and PWM Pin
GPIO_SetupPinMux(22, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(22, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO22 = 1;
// LED2
GPIO_SetupPinMux(94, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(94, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPCCLEAR.bit.GPIO94 = 1;
// LED3
GPIO_SetupPinMux(95, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(95, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPCCLEAR.bit.GPIO95 = 1;
// LED4
GPIO_SetupPinMux(97, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(97, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPDCLEAR.bit.GPIO97 = 1;
// LED5
GPIO_SetupPinMux(111, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(111, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPDCLEAR.bit.GPIO111 = 1;
// LED6
GPIO_SetupPinMux(130, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(130, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO130 = 1;
// LED7
GPIO_SetupPinMux(131, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(131, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO131 = 1;
// LED8
GPIO_SetupPinMux(25, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(25, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO25 = 1;
// LED9
GPIO_SetupPinMux(26, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(26, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO26 = 1;
// LED10
GPIO_SetupPinMux(27, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(27, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPACLEAR.bit.GPIO27 = 1;
// LED11
GPIO_SetupPinMux(60, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(60, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBCLEAR.bit.GPIO60 = 1;
// LED12
GPIO_SetupPinMux(61, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(61, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBCLEAR.bit.GPIO61 = 1;
// LED13
GPIO_SetupPinMux(157, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(157, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO157 = 1;
// LED14
GPIO_SetupPinMux(158, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(158, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO158 = 1;
// LED15
GPIO_SetupPinMux(159, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(159, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPECLEAR.bit.GPIO159 = 1;
// LED16
GPIO_SetupPinMux(160, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(160, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPFCLEAR.bit.GPIO160 = 1;
//WIZNET Reset
GPIO_SetupPinMux(0, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(0, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO0 = 1;
//ESP8266 Reset
GPIO_SetupPinMux(1, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(1, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO1 = 1;
// //SPIRAM CS Chip Select
// GPIO_SetupPinMux(19, GPIO_MUX_CPU1, 0);
// GPIO_SetupPinOptions(19, GPIO_OUTPUT, GPIO_PUSHPULL);
// GpioDataRegs.GPASET.bit.GPIO19 = 1;
//DRV8874 #1 DIR Direction
GPIO_SetupPinMux(29, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(29, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO29 = 1;
//DRV8874 #2 DIR Direction
GPIO_SetupPinMux(32, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(32, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPBSET.bit.GPIO32 = 1;
//DAN28027 CS Chip Select
GPIO_SetupPinMux(9, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(9, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPASET.bit.GPIO9 = 1;
//MPU9250 CS Chip Select
GPIO_SetupPinMux(66, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(66, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
//WIZNET CS Chip Select
GPIO_SetupPinMux(125, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(125, GPIO_OUTPUT, GPIO_PUSHPULL);
GpioDataRegs.GPDSET.bit.GPIO125 = 1;
//PushButton 1
GPIO_SetupPinMux(4, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(4, GPIO_INPUT, GPIO_PULLUP);
//PushButton 2
GPIO_SetupPinMux(5, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(5, GPIO_INPUT, GPIO_PULLUP);
//PushButton 3
GPIO_SetupPinMux(6, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(6, GPIO_INPUT, GPIO_PULLUP);
//PushButton 4
GPIO_SetupPinMux(7, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(7, GPIO_INPUT, GPIO_PULLUP);
//Joy Stick Pushbutton
GPIO_SetupPinMux(8, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(8, GPIO_INPUT, GPIO_PULLUP);
GPIO_SetupPinMux(9, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(9, GPIO_INPUT, GPIO_PULLUP);
// Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
InitPieVectTable();
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this project
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.ADCD1_INT = &ADCD_ISR;
PieVectTable.TIMER0_INT = &cpu_timer0_isr;
PieVectTable.TIMER1_INT = &cpu_timer1_isr;
PieVectTable.TIMER2_INT = &cpu_timer2_isr;
PieVectTable.SCIA_RX_INT = &RXAINT_recv_ready;
PieVectTable.SCIC_RX_INT = &RXCINT_recv_ready;
PieVectTable.SCID_RX_INT = &RXDINT_recv_ready;
PieVectTable.SCIA_TX_INT = &TXAINT_data_sent;
PieVectTable.SCIC_TX_INT = &TXCINT_data_sent;
PieVectTable.SCID_TX_INT = &TXDINT_data_sent;
PieVectTable.SPIB_RX_INT = &SPIB_isr;
PieVectTable.EMIF_ERROR_INT = &SWI_isr;
PieVectTable.ECAP1_INT = &ecap1_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
// Initialize the CpuTimers Device Peripheral. This function can be
// found in F2837xD_CpuTimers.c
InitCpuTimers();
// Configure CPU-Timer 0, 1, and 2 to interrupt every second:
// 200MHz CPU Freq, Period (in uSeconds)
ConfigCpuTimer(&CpuTimer0, LAUNCHPAD_CPU_FREQUENCY, 1000);//20 ms =20000 ex3 //1ms =1000 for ex4
ConfigCpuTimer(&CpuTimer1, LAUNCHPAD_CPU_FREQUENCY, 20000);
ConfigCpuTimer(&CpuTimer2, LAUNCHPAD_CPU_FREQUENCY, 4000);
// Enable CpuTimer Interrupt bit TIE
CpuTimer0Regs.TCR.all = 0x4000;
CpuTimer1Regs.TCR.all = 0x4000;
CpuTimer2Regs.TCR.all = 0x4000;
init_serial(&SerialA,115200,serialRXA);
init_serial(&SerialC,115200,serialRXC);
// setup_led_GPIO();
//
// //---------------------------------------------------------
//
// // Trigger pin for HC-SR04
// GPIO_SetupPinMux(0, GPIO_MUX_CPU1, 0);
// GPIO_SetupPinOptions(0, GPIO_OUTPUT, GPIO_PUSHPULL);
// GpioDataRegs.GPACLEAR.bit.GPIO0 = 1;
//
// // Echo pin for HC-SR04
// EALLOW;
// InputXbarRegs.INPUT7SELECT = 19; // Set eCAP1 source to GPIO-pin
// EDIS;
// GPIO_SetupPinOptions(19, GPIO_INPUT, GPIO_ASYNC);
//
// InitECapture();
EPwm2Regs.TBCTL.bit.CTRMODE = 0;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3;
EPwm2Regs.TBCTL.bit.PHSEN = 0;
EPwm2Regs.TBCTL.bit.CLKDIV = 0;
//TBCTR
EPwm2Regs.TBCTR = 0;
//TBPRD
EPwm2Regs.TBPRD = 2500;
//CMPA
EPwm2Regs.CMPA.bit.CMPA = 1250;
EPwm2Regs.AQCTLA.bit.ZRO= 2;
EPwm2Regs.AQCTLA.bit.CAU= 1;
EPwm2Regs.TBPHS.bit.TBPHS=0;
EPwm2Regs.TBCTR = 0x0;
GPIO_SetupPinMux(2, GPIO_MUX_CPU1, 1);
//2B
GPIO_SetupPinMux(3, GPIO_MUX_CPU1, 1);
EPwm2Regs.CMPB.bit.CMPB = 1250;
EPwm2Regs.AQCTLB.bit.CBU= 1;
EPwm2Regs.AQCTLB.bit.ZRO= 2;
EALLOW; // Below are protected registers
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1; // For EPWM2A
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1; // For EPWM2B
EDIS;
//Lab4
EALLOW;
EPwm5Regs.ETSEL.bit.SOCAEN = 0; // Disable SOC on A group
EPwm5Regs.TBCTL.bit.CTRMODE = 3; // freeze counter
EPwm5Regs.ETSEL.bit.SOCASEL = 2; // Select Event when counter equal to PRD
EPwm5Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event (pulse is the same as trigger)
EPwm5Regs.TBCTR = 0x0; // Clear counter
EPwm5Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm5Regs.TBCTL.bit.PHSEN = 0; // Disable phase loading
EPwm5Regs.TBCTL.bit.CLKDIV = 0; // divide by 1 50Mhz Clock
//EPwm5Regs.TBPRD = 50000; // Set Period to 1ms sample. Input clock is 50MHz.//ex 1,2,3
// EPwm5Regs.TBPRD = 12500;//0.25ms
EPwm5Regs.TBPRD = 5000;//part4 of ex4
// Notice here that we are not setting CMPA or CMPB because we are not using the PWM signal
EPwm5Regs.ETSEL.bit.SOCAEN = 1; //enable SOCA
EPwm5Regs.TBCTL.bit.CTRMODE = 0; //unfreeze, and enter up count mode
EDIS;
EALLOW;
AdcdRegs.ADCCTL2.bit.PRESCALE = 6; //set ADCCLK divider to /4
AdcSetMode(ADC_ADCD, ADC_RESOLUTION_12BIT, ADC_SIGNALMODE_SINGLE); //read calibration settings
AdcdRegs.ADCCTL1.bit.INTPULSEPOS = 1;
AdcdRegs.ADCCTL1.bit.ADCPWDNZ = 1;
//delay for 1ms to allow ADC time to power up
DELAY_US(1000);
//ADCD
AdcdRegs.ADCSOC0CTL.bit.CHSEL = 0; // set SOC0 to convert pin D0
AdcdRegs.ADCSOC0CTL.bit.ACQPS = 99; //sample window is acqps + 1 SYSCLK cycles = 500ns
AdcdRegs.ADCSOC0CTL.bit.TRIGSEL = 13; // EPWM5 ADCSOCA will trigger SOC0
AdcdRegs.ADCSOC1CTL.bit.CHSEL = 1; //set SOC1 to convert pin D1
AdcdRegs.ADCSOC1CTL.bit.ACQPS = 99; //sample window is acqps + 1 SYSCLK cycles = 500ns
AdcdRegs.ADCSOC1CTL.bit.TRIGSEL = 13; // EPWM5 ADCSOCA will trigger SOC1
//AdcdRegs.ADCSOC2CTL.bit.CHSEL = ???; //set SOC2 to convert pin D2
//AdcdRegs.ADCSOC2CTL.bit.ACQPS = 99; //sample window is acqps + 1 SYSCLK cycles = 500ns
//AdcdRegs.ADCSOC2CTL.bit.TRIGSEL = ???; // EPWM5 ADCSOCA will trigger SOC2
//AdcdRegs.ADCSOC3CTL.bit.CHSEL = ???; //set SOC3 to convert pin D3
//AdcdRegs.ADCSOC3CTL.bit.ACQPS = 99; //sample window is acqps + 1 SYSCLK cycles = 500ns
//AdcdRegs.ADCSOC3CTL.bit.TRIGSEL = ???; // EPWM5 ADCSOCA will trigger SOC3
AdcdRegs.ADCINTSEL1N2.bit.INT1SEL = 1 ; //set to SOC1, the last converted, and it will set INT1 flag ADCD1
AdcdRegs.ADCINTSEL1N2.bit.INT1E = 1; //enable INT1 flag
AdcdRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //make sure INT1 flag is cleared
EDIS;
// init_serial(&SerialC,115200,serialRXC);
// init_serial(&SerialD,115200,serialRXD);
setupSpib(); //Call this function in main() somewhere after the DINT; line of code.//ex4
init_eQEPs();
// Enable CPU int1 which is connected to CPU-Timer 0, CPU int13
// which is connected to CPU-Timer 1, and CPU int 14, which is connected
// to CPU-Timer 2: int 12 is for the SWI.
IER |= M_INT1;
IER |= M_INT4; // Enable CPU INT4 which is connected to ECAP1-4 INT
IER |= M_INT8; // SCIC SCID
IER |= M_INT9; // SCIA
IER |= M_INT12;
IER |= M_INT13;
IER |= M_INT14;
IER |= M_INT6; //SPIB
// Enable eCAP INT1 in the PIE: Group 4 interrupt 1
PieCtrlRegs.PIEIER4.bit.INTx1 = 1;
// Enable TINT0 in the PIE: Group 1 interrupt 7
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
//enabling ADCD
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
// Enable SWI in the PIE: Group 12 interrupt 9
PieCtrlRegs.PIEIER12.bit.INTx9 = 1;
// Enable SPIB in the PIE: Group 6 interrupt 3
PieCtrlRegs.PIEIER6.bit.INTx3 =1;
// Enable global Interrupts and higher priority real-time debug events
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
// IDLE loop. Just sit and loop forever (optional):
while(1)
{
if (UARTPrintA == 1 ) {
// serial_printf(&SerialA,"Num Timer2:%ld Num SerialRX: %ld\r\n",CpuTimer2.InterruptCount,numRXA);
//serial_printf(&SerialA,"%s \r\n",buff);//ex3
//serial_printf(&SerialA,"aX:%.2f aY:%.2f aZ:%.2f gX:%.2f gY:%.2f gZ:%.2f\r\n",accelXReading,accelYReading,accelZReading,gyroXReading,gyroYReading,gyroZReading);
//serial_printf(&SerialA,"Left Wheel Distance :%f Right Wheel Distance:%f \r\n",LeftD,RightD);
//serial_printf(&SerialA,"X :%f Y:%f theta:%f \r\n",x_r,y_r,phi_r );
//serial_printf(&SerialA,"IR :%.3f \r\n", (float)adcd0result);
sscanf(buff,"%f %f %f %f %f %f %f %f %f %f",&num1, &num2,&num3, &num4,&num5, &num6,&num7, &num8,&num9, &num10);
UARTPrintA = 0;
}
if (UARTPrintC == 1) {
serial_printf(&SerialC,"*%.4f %.4f#",sendfloat1,sendfloat2);
UARTPrintC = 0;
}
}
}
// SWI_isr, Using this interrupt as a Software started interrupt
__interrupt void SWI_isr(void) {
// These three lines of code allow SWI_isr, to be interrupted by other interrupt functions
// making it lower priority than all other Hardware interrupts.
PieCtrlRegs.PIEACK.all = PIEACK_GROUP12;
asm(" NOP"); // Wait one cycle
EINT; // Clear INTM to enable interrupts
// Insert SWI ISR Code here.......
numSWIcalls++;
DINT;
}
__interrupt void SPIB_isr(void){
GpioDataRegs.GPCSET.bit.GPIO66 = 1;
// spivalue1 = SpibRegs.SPIRXBUF; // Read first 16 bit value off RX FIFO. Probably is zero since no chip
// spivalue2 = SpibRegs.SPIRXBUF; // Read second 16 bit value off RX FIFO. Again probably zero
// spivalue3= SpibRegs.SPIRXBUF; //part3
// x = ((float)spivalue2/4095.0)*3.3;
// y = ((float)spivalue2/4095.0)*3.3;
// GpioDataRegs.GPASET.bit.GPIO9 = 1; // Set GPIO 9 high to end Slave Select. Now to Scope. Later to deselect DAN28027
//// Later when actually communicating with the DAN28027 do something with the data. Now do nothing.
// SpibRegs.SPIFFRX.bit.RXFFOVFCLR = 1; // Clear Overflow flag just in case of an overflow
// SpibRegs.SPIFFRX.bit.RXFFINTCLR = 1; // Clear RX FIFO Interrupt flag so next interrupt will happen
// PieCtrlRegs.PIEACK.all = PIEACK_GROUP6; // Acknowledge INT6 PIE interrupt //ex3
// int16_t dummy= 0;
// int16_t accelXraw = 0;
// int16_t accelYraw = 0;
// int16_t accelZraw = 0;
// int16_t dummy2 = 0;
// int16_t gyroXraw = 0;
// int16_t gyroYraw = 0;
// int16_t gyroZraw = 0;
...
This file has been truncated, please download it to see its full contents.







_VHQnnVk5UI.jpeg){kind=link}
Comments
Please log in or sign up to comment.