As the urban environment deteriorates day by day, especially in China's big cities such as Beijing, PM2.5 remains high, and light pollution makes the night of the city as daytime... People are increasingly concerned about the living environment. The improvement of the environment is inseparable from the hard work of everyone. We hope to encourage people to grow green plants in a fun and intelligent way and bring new pleasure to our own lives.
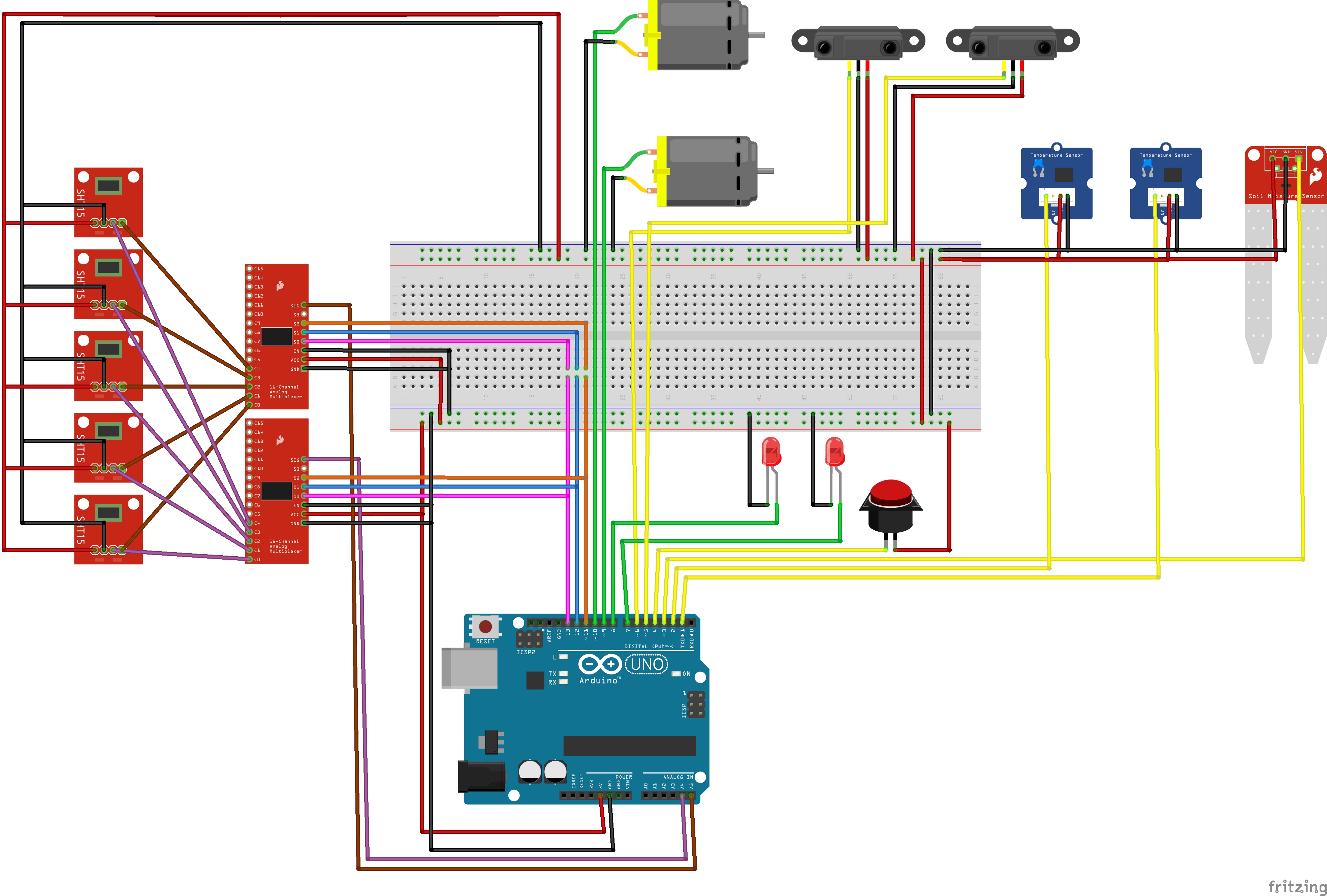
What we makeSo we made a flowerpot equipped with an air quality sensor, a light intensity sensor, and a temperature and humidity sensor to monitor our living environment in real time.
What's more, it is also a smart flowerpot - setting parameters for the different needs of light and water for different plants planted in the pot. In order to get enough sunshine, the flowerpot will move itself to the most suitable location through moters and caterpillars mounted on the bottom. It can also feedback the soil moisture and the temperature and humidity of the air in real time, so that even novice planters can plant well. Such a roaming flowerpot, is just as fun as keeping pets, so as to encourage everyone to have more green plants at home and in the office, making the living environment more comfortable.
Plants enjoy the sun in the right place
monitoring living environment and plants' condition
At present, the flowerpot is powered by lithium batteries. To be more environmentally friendly, we hope to upgrade to solar power. The flowerpot can absorb and store energy during the day.
Additionally, weather forecast data can be integrated to the flowerpot in the future. Then it can automatically move to the open air on rainy days and irrigated with natural rainwater. When the soil is sufficiently humid, it can return indoor automatically.
We hope that SunFllowerPot can make people to pay more attention to environmental changes, start from the green plants around them, and make the earth a better place.
随着城市环境日益变差,特别是中国的大城市如北京,PM2.5居高不下,光污染让城市的夜晚如同白昼……人们越来越关注生活环境。环境的改善离不开每个人点滴的努力,我们希望用一种有趣而智能的方式,鼓励每一个人种植绿植,同时给生活带来新的乐趣。
我们的作品于是我们做了一个花盆,配备了空气质量传感器、光强传感器、温湿度传感器,可以实时监测自己的生活环境;
不仅如此,这还是一个智能花盆——针对花盆里种植的不同植物对光、水的不同需求而设置参数,使他们可以通过花盆底部安装的moter和履带,在空间中自己移动到光线强度最合适的位置,以获得足够的日照,也可以实时反馈植物土壤的水分含量、空气温湿度,让种植新手也可以更好地养护植物。这样一个会散步的花盆“格鲁特”,就像养宠物一样有趣,以鼓励大家多在家中、办公室中种植绿色植物,让生活环境更好。
未来展望目前花盆是用锂电池供电,为了更加环保,我们希望可以使用太阳能为花盆供电,当花盆白天在阳光下时可以吸收能量储存下来。
另外,将来可以对接天气预报数据,在下雨天自动移到露天处,用自然雨水灌溉,当土壤湿度传感器水分足够时,花盆又可以自动回家。
结语我们希望SunFllowerPot可以让人们更加关注环境变化,从身边的绿植开始,在一点一滴中把地球变得更加美好。





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}


Comments