// by soumil shah
#include
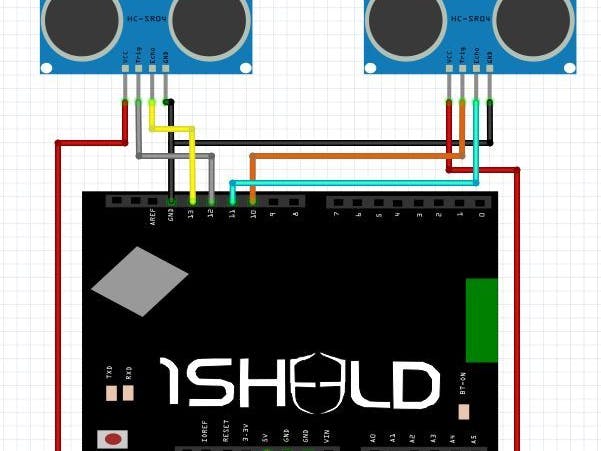
#define inputPin 11
#define outputPin 10
#define inputPin2 13
#define outputPin2 12
#define my_constant 20
unsigned int sensor_r_value;
unsigned int sensor_l_value;
unsigned int sensor_r_value_last;
unsigned int sensor_l_value_last;
int difference;
void setup(){
pinMode(inputPin,INPUT);
pinMode(outputPin,OUTPUT);
pinMode(inputPin2,INPUT);
pinMode(outputPin2,OUTPUT);
OneSheeld.begin();
}
void loop(){
read_sensors();
delay(1500);
}
int measure_r(){
digitalWrite(outputPin, LOW); // send low pulse for 2s
delayMicroseconds(2);
digitalWrite(outputPin, HIGH); // send high pulse for 10s
delayMicroseconds(10);
digitalWrite(outputPin, LOW); // back to low pulse
int distance = pulseIn(inputPin, HIGH); // read echo value
int distance1 = distance/29/2; // in cm
return distance1;
}
int measure_l(){
digitalWrite(outputPin2, LOW); // send low pulse for 2s
delayMicroseconds(2);
digitalWrite(outputPin2, HIGH); // send high pulse for 10s
delayMicroseconds(10);
digitalWrite(outputPin2, LOW); // back to low pulse
int distance = pulseIn(inputPin2, HIGH); // read echo value
int distance2 = distance/29/2; // in cm
return distance2;
}
int read_sensors(){
sensor_r_value = measure_r();
sensor_l_value = measure_l();
if (sensor_r_value) {
TextToSpeech.say("stop now and rotate");
}
if (sensor_r_value > 30 && sensor_l_value > 30 && sensor_r_value_last) {
TextToSpeech.say("Go Forward");
}
sensor_r_value_last = sensor_r_value;
sensor_l_value_last = sensor_l_value;
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



Comments
Please log in or sign up to comment.