What Ozbot Is About?The project is focused on developing an autonomous line tracking inventory tracking robot for warehouse environments, aimed at enhancing efficiency and accuracy in inventory management. This robot leverages advanced technologies to navigate and image rack spaces within warehouses. It currently follows pre-defined lines for navigation, with ongoing work to incorporate full autonomy using 2D Lidar and Simultaneous Localization and Mapping (SLAM) techniques.
VisionThe motivation behind creating this robot was to address the challenges faced by warehouses in inventory tracking, including the need for high accuracy, efficiency, and the reduction of manual labor. The goal was to develop a cost-effective, automated solution that could seamlessly integrate into existing warehouse operations, improving inventory management processes.
How does it work?The robot operates on a dual-mode basis: initially, it follows predetermined lines on the warehouse floor for navigation. This is achieved through the use of ROS2 and OpenCV for line detection and navigation. The robot is equipped with a robotic arm, which extends to capture images of the rack spaces using shutter cameras. These images are processed to track and manage inventory.
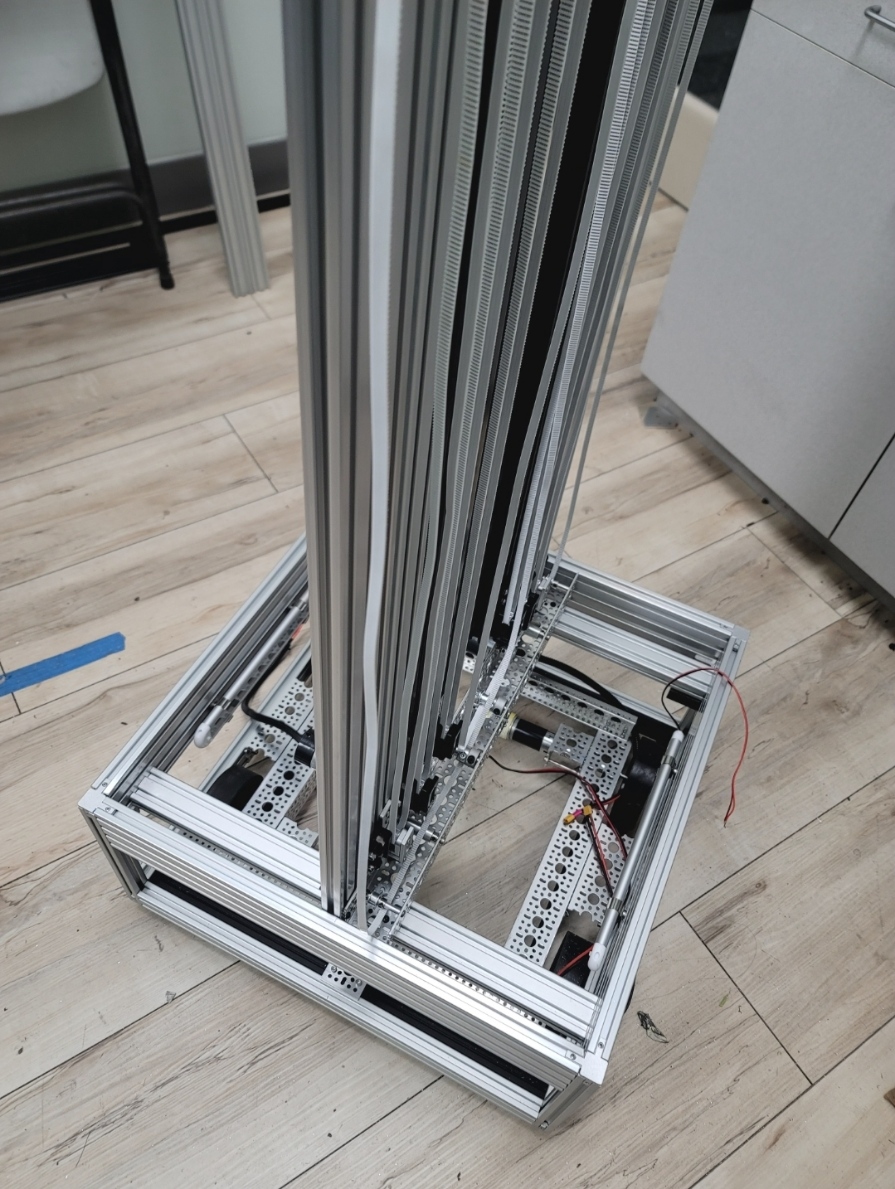
Structure without harness
FullAutonomy in ProgressTo transition towards full autonomy, the robot is being upgraded with 2D Lidar for enhanced navigation and mapping capabilities. Using SLAM, it can dynamically understand and navigate the warehouse space without relying on pre-defined paths.
Robot Base and Extending Arm: Utilized OnShape CAD for design, 20 series square T-slot profiles for the structure, and parts manufactured with a 3D printer.
Main Controller: Kria KR260 Robotics Starter Kit has been selected as the main controller for the robot, providing a robust and flexible platform for developing and deploying complex robotic applications. Its integration facilitates advanced robotics functionalities and real-time processing capabilities.
Imaging System: Attached to the extending arm, Sony IMX547 Monochrome Camera Kit is employed to capture high-resolution detailed images of rack spaces. Its inclusion ensures high-quality imaging for accurate inventory tracking.
Image Processing and AI: To process the images captured by the shutter camera, Vitis AI software is utilized. This software enables the deployment of AI models and algorithms directly on the robot, allowing for efficient and accurate analysis of inventory images.
Navigation and Control: ROS2 for overall robot software infrastructure, Python and C++ for programming, OpenCV for image processing and line tracking, ros2_control for hardware abstraction, Roboclaw motor controllers for managing DC motor movements.
Autonomy and Sensing: RPLIDAR for 360-degree lidar scanning, Realsense D435i for 3D imaging and depth sensing, and Navigation2 for ROS2-based autonomous navigation.
Development Process: The project was conceptualized, programmed, designed, manufactured, and managed entirely by the creator.







.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








_0k4QKzk9l9.png)



{kind=link}
{kind=link}
{kind=link}
_0k4QKzk9l9.png){kind=link}
Comments
Please log in or sign up to comment.