

Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
The Project consists in the creation of a simple and flexible programming structure that allows the adaptation to several solutions. Although this project specifies a particular application case, it is a simple and cost-effective programming solution that can give rise to several applications covering the commercial, security and industry areas.
As an example of practical application of the project I present one of the possible implementation solutions, which is the detection of sequence on High
way and which still has the following functionality:
- Detection of the correct direction;
- Counting vehicles in the right direction;
- Detection of vehicles in the wrong direction;
- Immediate generation Alarm of car in the wrong direction ;
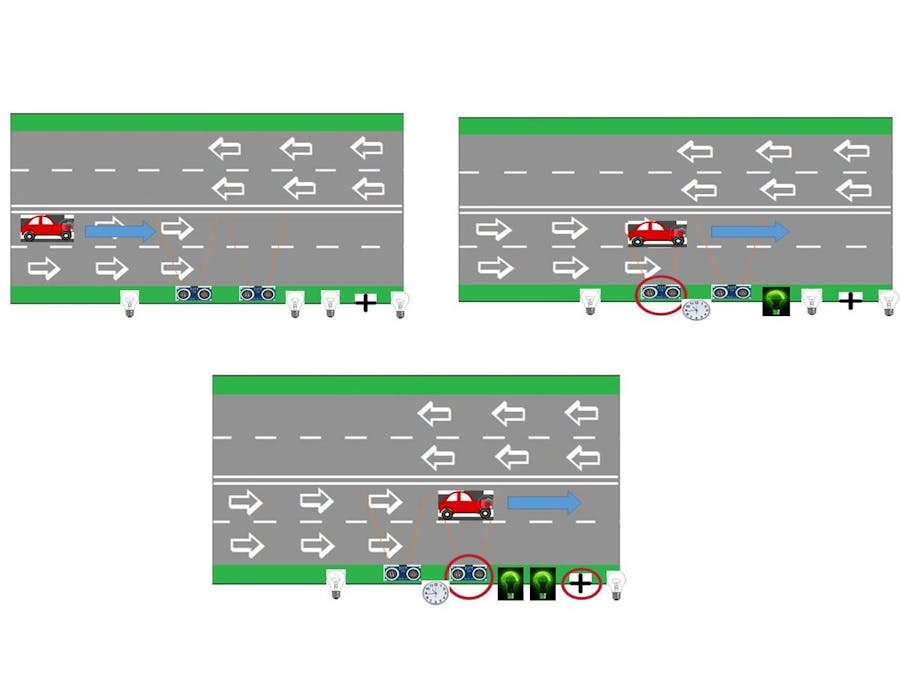
Sequence - correct direction
Sensor 1 detects the vehicle. This detection activates a timer and activates sensor 2. If the sensor is activated ahead of time the sequence is considered correct and counts the number of cars passing in the correct direction.
Sequence - incorrect direction
Since sensor 2 only activates after sensor 1 detects an object, the car in the wrong sequence will only be detected by sensor1 for the first time. As sensor 2 will not be activated in the stipulated time after this time, an alarm will be generated.
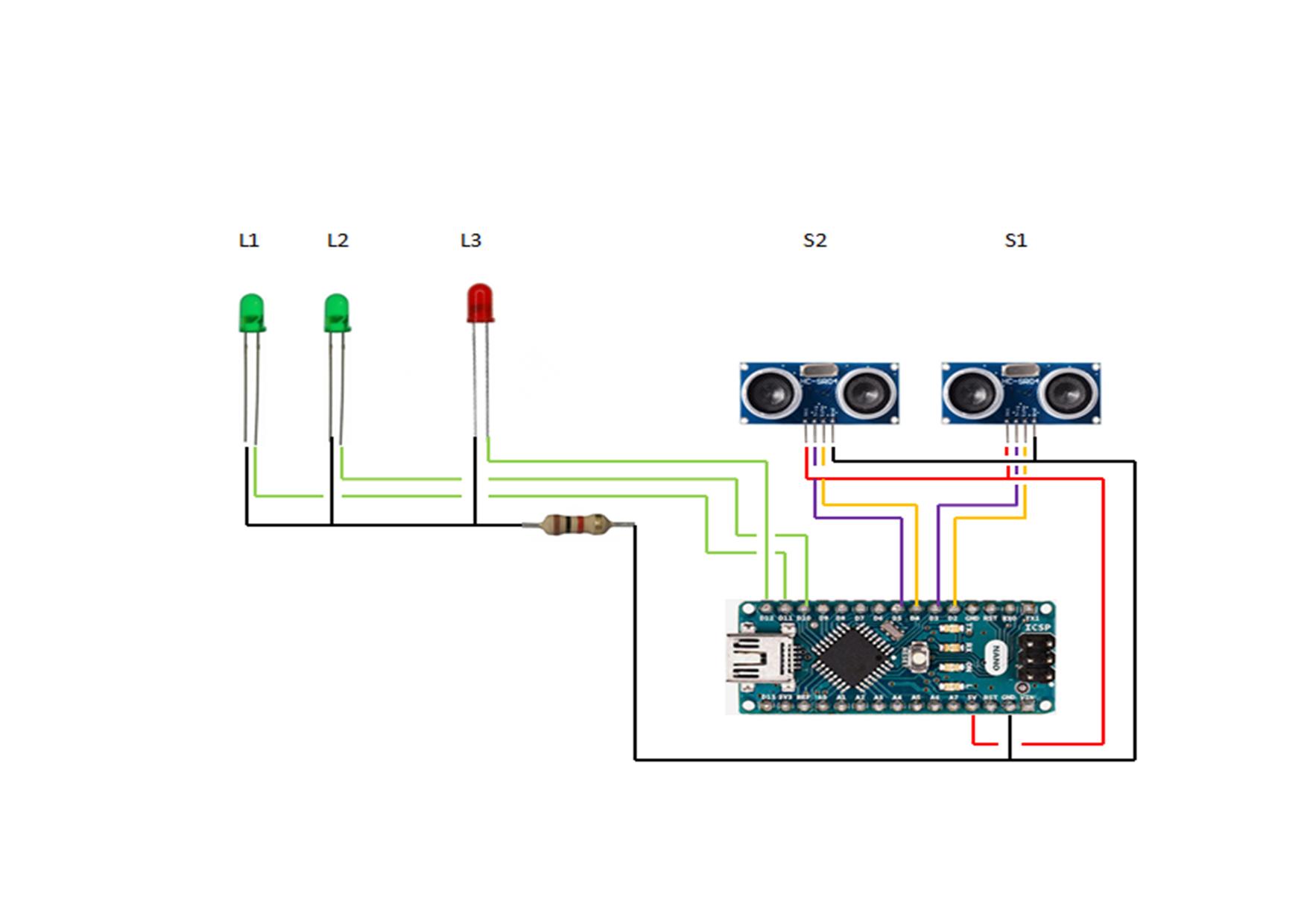
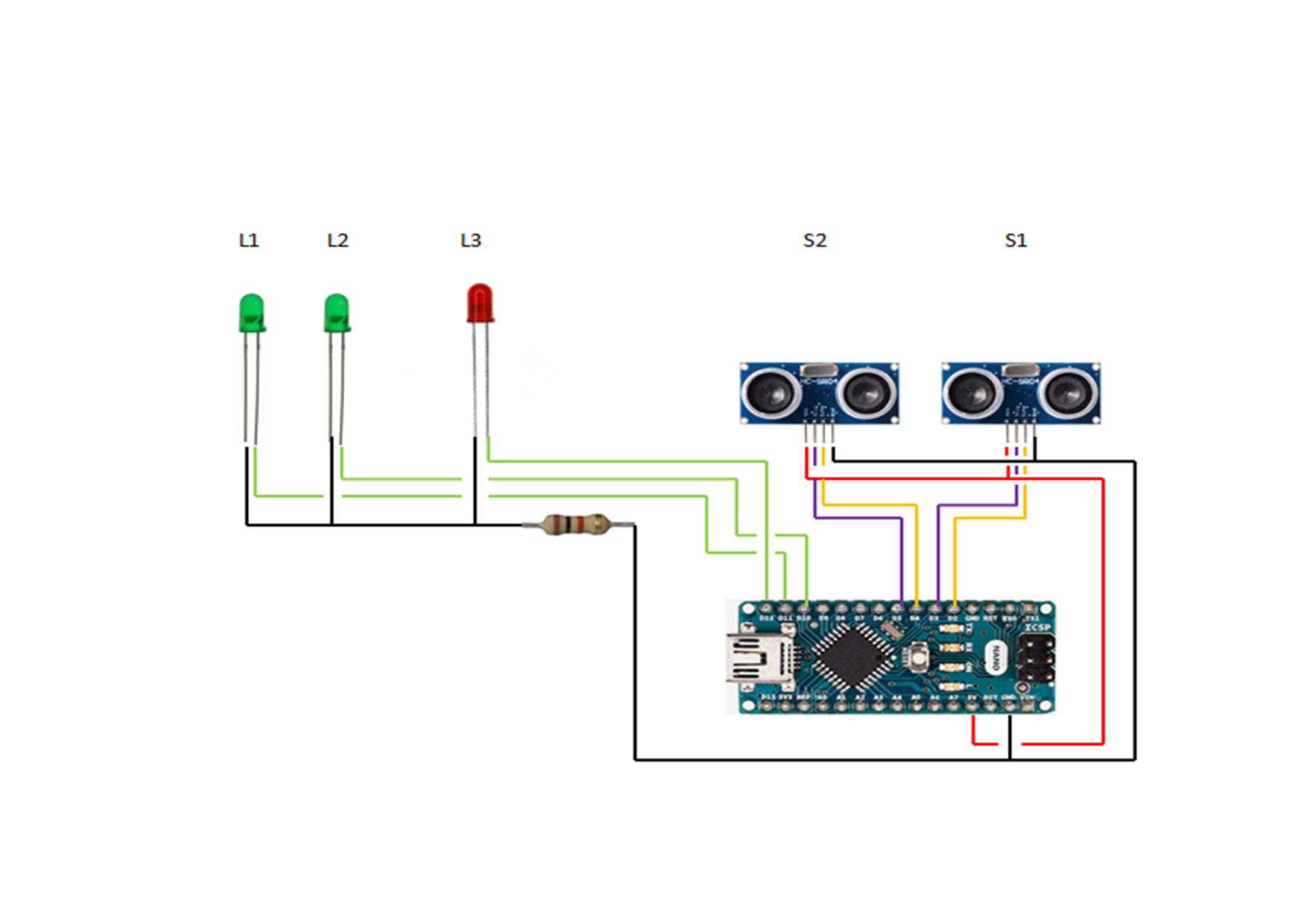
Entity and Architecture
FSM - The objective of this work was to build a very versatile finite states machine that can "perceive" the direction of the object and generate alarms or orders.
Other possibilities of application of the finite state machine
Security - We can adapt the state machine to generate an alarm when the sequence is detected in the fall of children to a pool.
Control - We can adapt the machine of states and count the number of people that enter and leave a store, as well as the number of people inside.
Domotica - we can see the meaning of a person moving in a corridor and lighting only the necessary lighting. We can also control the direction of the car by opening gates or lighting house lights, etc... It is a machine of states that with small adaptations will be very functional in an intelligent building management system.




{kind=link}
Comments