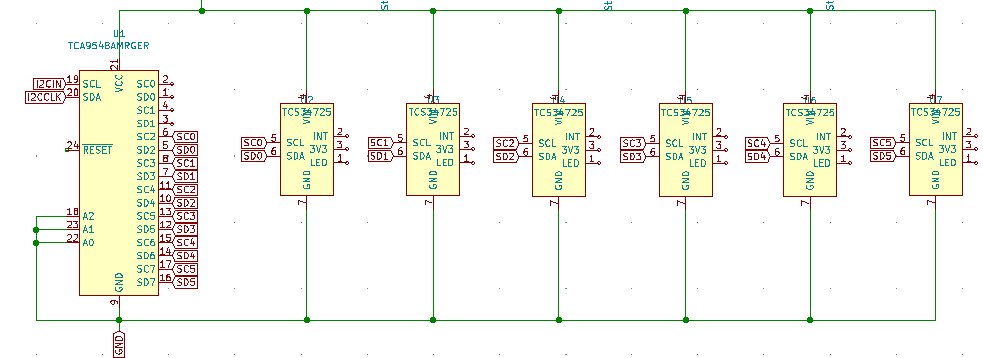
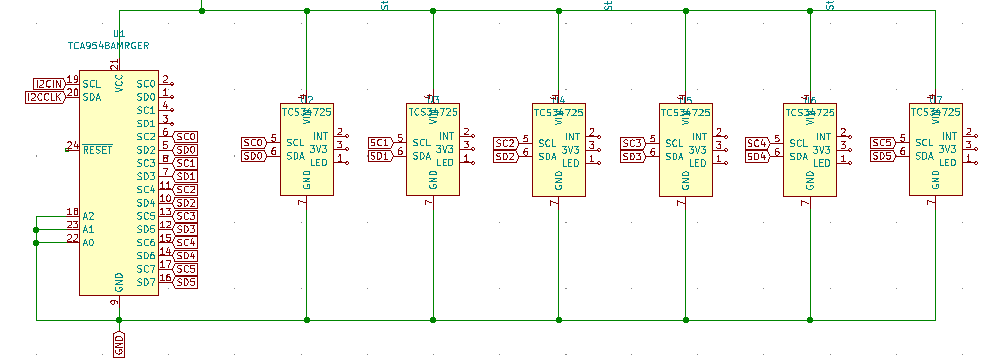
// Setting up 6 TCS34725 sensors together and reading their output values
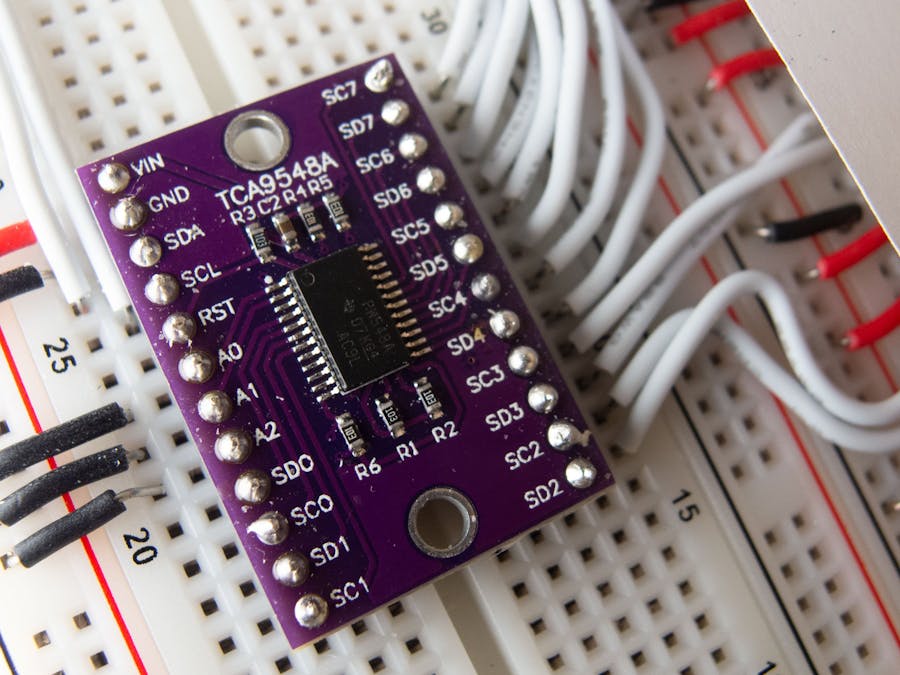
// TCA9548A
#include <Wire.h>
#include "Adafruit_TCS34725.h"
#define inPin 7
#define rPin 8
#define gPin 9
#define bPin 10
byte multiAddress = 0x70;
byte count = 0;
int currentTime = 0;
char data[6][3] = {{'r', 'g', 'b'},
{'r', 'g', 'b'},
{'r', 'g', 'b'},
{'r', 'g', 'b'},
{'r', 'g', 'b'},
{'r', 'g', 'b'}};
Adafruit_TCS34725 tcs[] = {Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_50MS, TCS34725_GAIN_1X),
Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_50MS, TCS34725_GAIN_1X),
Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_50MS, TCS34725_GAIN_1X),
Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_50MS, TCS34725_GAIN_1X),
Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_50MS, TCS34725_GAIN_1X),
Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_50MS, TCS34725_GAIN_1X)};
byte gammatable[256];
void setup(){
Serial.begin(9600);
Wire.begin();
pinMode(inPin, INPUT_PULLUP);
pinMode(rPin, OUTPUT);
pinMode(gPin, OUTPUT);
pinMode(bPin, OUTPUT);
// gammatable for more color accuracy when outputting on LED
for(int i =0; i < 256; i++){
float x = i;
x /= 255;
x = pow(x, 2.5);
x *= 255;
gammatable[i] = x;
}
initColorSensors();
attachInterrupt(digitalPinToInterrupt(inPin), changeLED, CHANGE);
}
void loop(){
//for(int i = 0; i < sizeof(data); i++){ // get all colors... not necessary right now
// readColors(i);
//}
for(int i = 0; i < 5; i++){
readColors(count);
}
}
void changeLED(){
if(millis() - currentTime > 200){
count++;
currentTime = millis();
}
if(count > 5){
count = 0;
}
}
void initColorSensors(){
for(int i = 0; i < 6; i++){
Serial.println(i);
chooseBus(i);
if (tcs[i].begin()){
Serial.print("Found sensor "); Serial.println(i+1);
} else{
Serial.println("No Sensor Found");
while (true);
}
}
}
void readColors(byte sensorNum){
chooseBus(sensorNum);
uint16_t r, g, b, c;
tcs[sensorNum].getRawData(&r, &g, &b, &c); // reading the rgb values 16bits at a time from the i2c channel
processColors(r, g, b, c); // processing by dividng by clear value and then multiplying by 256
//data[sensorNum][0] = r;
//data[sensorNum][1] = g;
//data[sensorNum][2] = b;
Serial.print("R: "); Serial.print(r, DEC); Serial.print(" ");
Serial.print("G: "); Serial.print(g, DEC); Serial.print(" ");
Serial.print("B: "); Serial.print(b, DEC); Serial.print(" "); Serial.print(c); Serial.print(" ");
displayLED(r, g, b);
Serial.println(sensorNum);
}
void processColors(uint16_t r, uint16_t g, uint16_t b, uint32_t c){
// getting rid of IR component of light
r /= c;
g /= c;
b /= c;
// adding it back in
r *= 256;
g *= 256;
b *= 256;
}
void chooseBus(uint8_t bus){
Wire.beginTransmission(0x70);
Wire.write(1 << (bus+2)); // will be using 2-7 instead of 0-5 because of convience (placed better on the breadboard)
Wire.endTransmission();
}
void displayLED(uint16_t r, uint16_t g, uint16_t b){
if (r > 255 || g > 255 || b > 255){
analogWrite(rPin, 0);
analogWrite(gPin, 0);
analogWrite(bPin, 0);
} else{
analogWrite(rPin, gammatable[(int)r]);
analogWrite(gPin, gammatable[(int)g]);
analogWrite(bPin, gammatable[(int)b]);
}
}









{kind=link}
Comments
Please log in or sign up to comment.