

Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
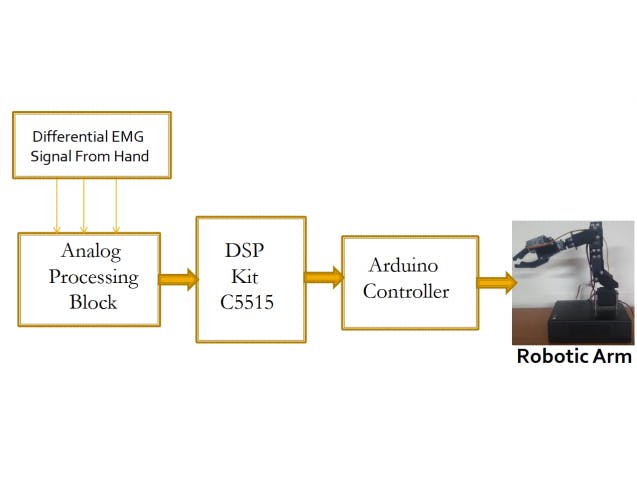
Now a days research on prosthetic limb is going on which can be used for physically disabled people. This is the motivation behind this project. In this project we are extracting EMG signal from two muscle of right hand and based on the hand movement we are controlling the robotic arm.
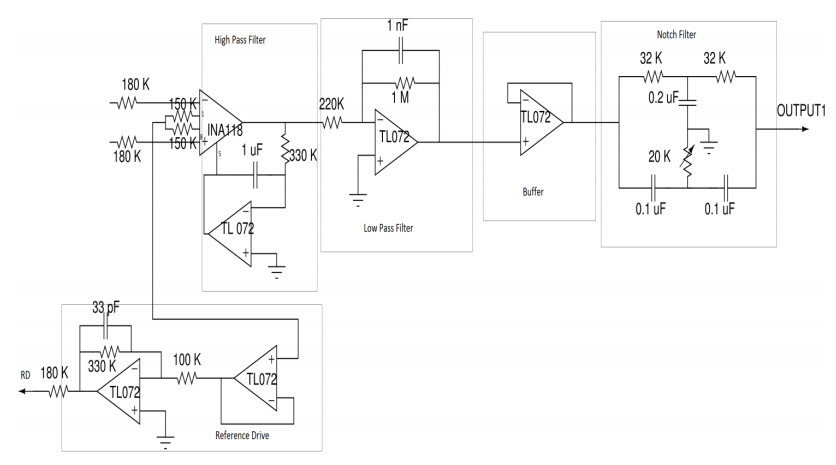
EMG signals are extracted using an analog front end which is fed to the DSP kit. Further processing of signal, feature extraction, and decision making (control signal for robotic arm) are done on DSP kit. DSP kit sends control signals to Ardunio controller using GPIO pins. Based on these signals Arduino controls the robotic arm.
Shivanshu Pandey
Posted by  Sagar G. Sangodkar
Sagar G. Sangodkar
Sagar G. SangodkarThanks to Harshal, Harshit, Harsh.




{kind=link}
Comments