



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
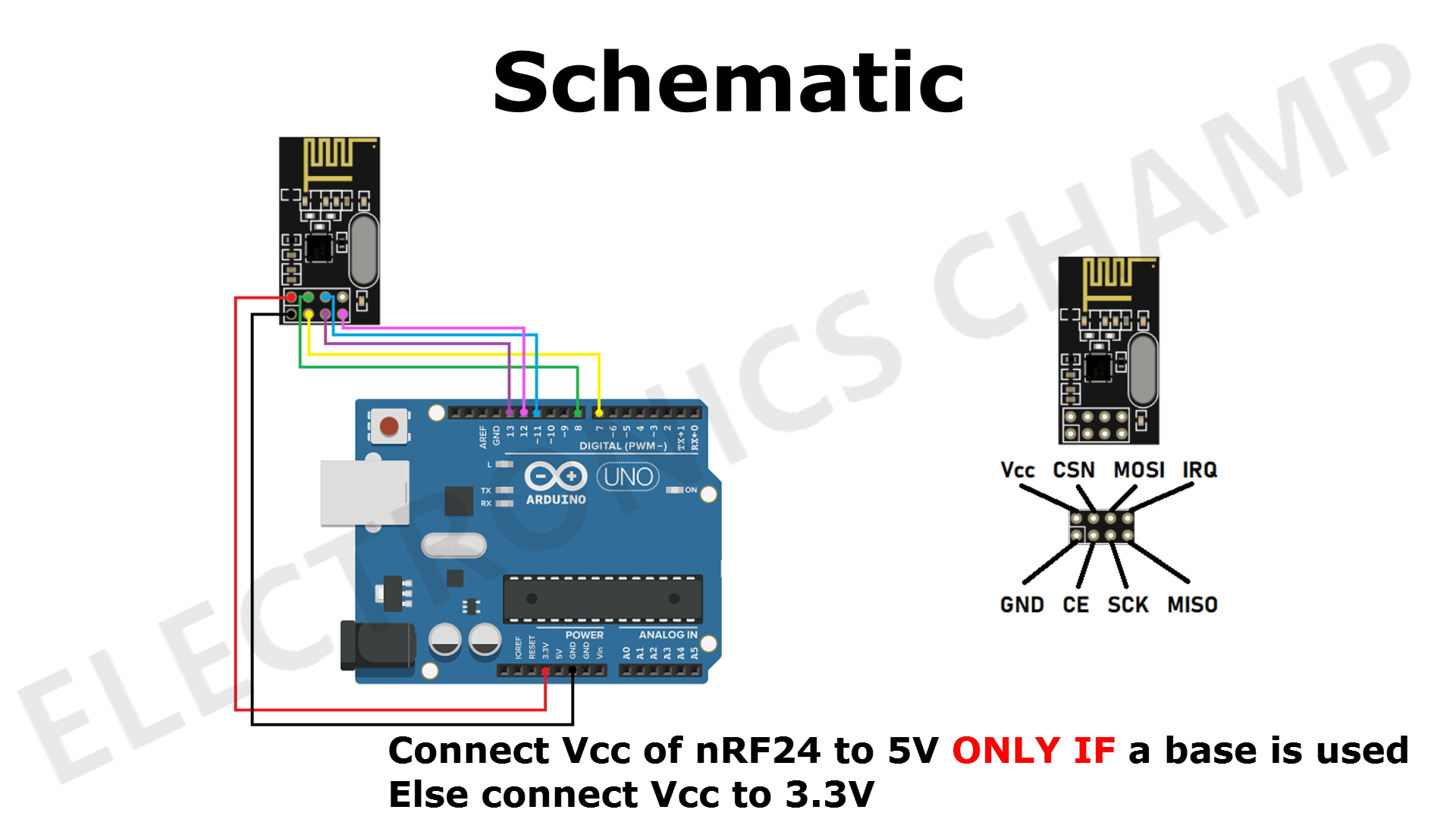
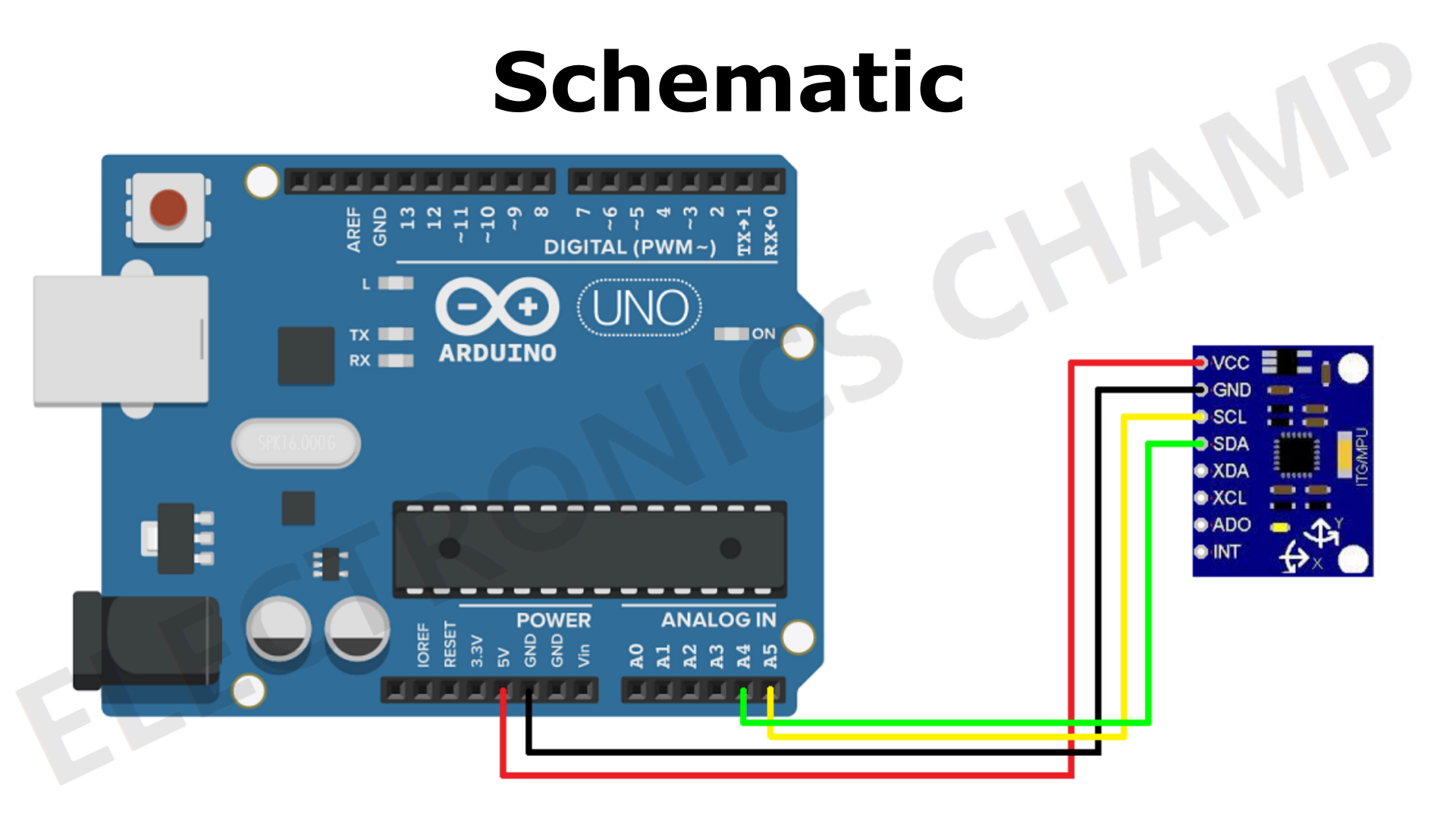
This project shows how to connect nRF24L01 Radio Module and MPU6050 with Arduino for projects that require gesture control.
The Arduino on the TX side reads the data from the MPU6050 connected to it and this data is transmitted to the Arduino on the RX side by the nRF24L01 Radio Modules.
Once the data is received by the Arduino on the RX side, it prints the received data on the Serial Monitor.
This project can be modified and used in any other projects that require gesture control.
{kind=link}
{kind=link}

4 projects • 11 followers
Projects based on breadboard electronics and Arduino with clear step-by-step instructions, circuit diagrams, schematics, and source code.
Comments
Please log in or sign up to comment.