



Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Building the automated guided wheelchair was a journey inspired by the vision of empowering those with mobility challenges. I started with a simple idea: to create a wheelchair that could navigate complex indoor environments independently, without constant human assistance. The initial phase involved extensive research into the challenges faced by mobility-impaired individuals—tight spaces, physical obstacles, and the sheer difficulty of maneuvering traditional wheelchairs in crowded areas.
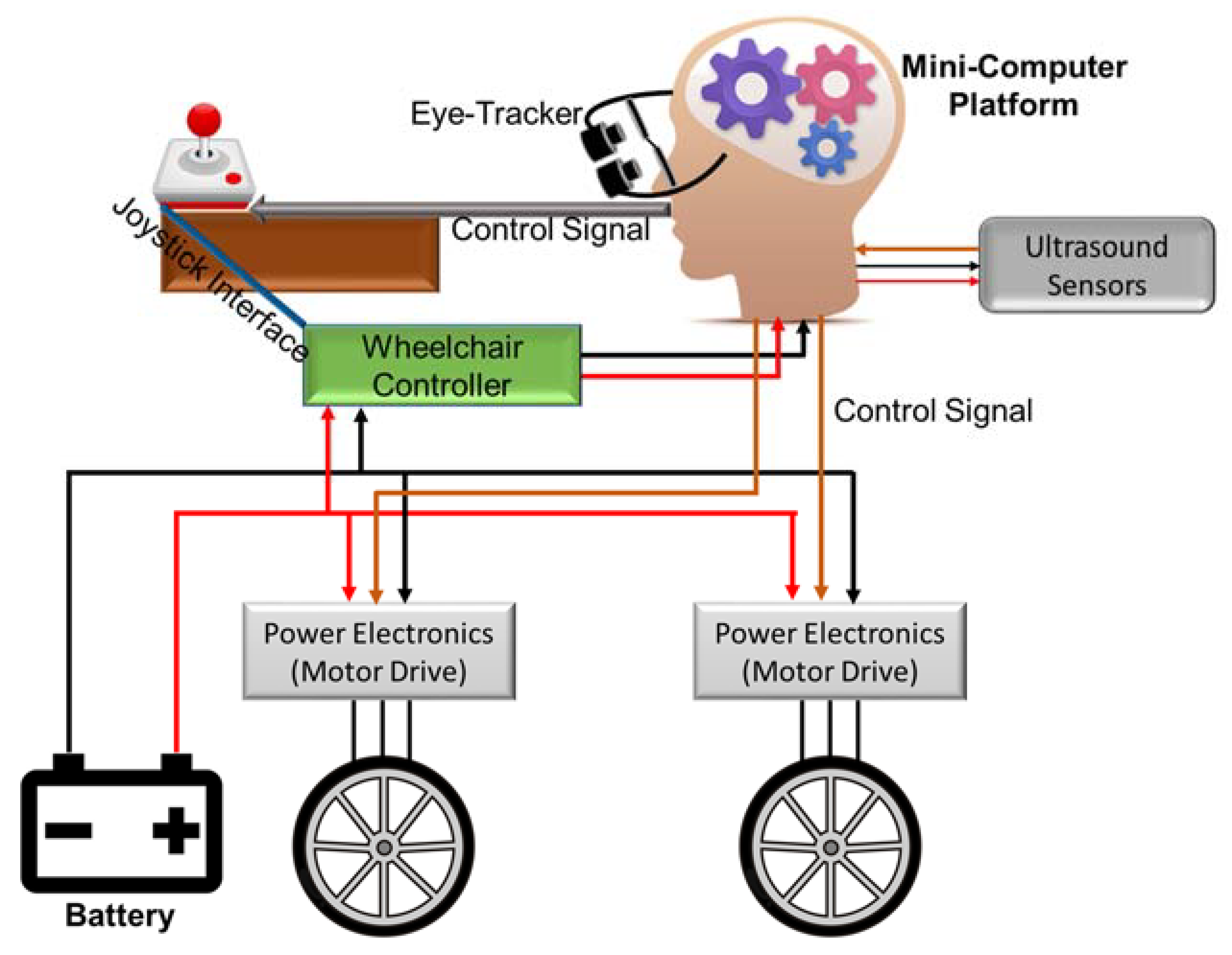
I dove into the design phase, selecting advanced sensors, cameras, and mapping technology that would allow the wheelchair to "see" and understand its surroundings. The key was to develop a system that could autonomously detect and avoid obstacles while navigating pre-programmed routes. I experimented with various hardware components, from LiDAR sensors to ultrasonic detectors, meticulously testing each one to ensure reliability and accuracy. Integrating these with a robust software platform, I crafted an intelligent system capable of real-time decision-making.
The most rewarding part was implementing user-friendly controls. I integrated a voice interface and a touchscreen, allowing users to simply state or input their desired destination. The wheelchair would then take over, navigating the route smoothly and safely, turning complex navigation into a seamless experience.
The use of this automated wheelchair goes beyond just mobility; it’s about restoring independence and confidence. Whether it’s moving through a busy office, a crowded shopping mall, or a home with tight hallways, the wheelchair provides users with the freedom to explore their surroundings without limitations. It reduces physical strain and removes the need for constant assistance, making daily tasks more manageable and enjoyable.
In essence, this automated wheelchair is not just a piece of technology; it's a step towards greater inclusivity, enabling individuals to reclaim control over their mobility and engage fully in their environment.



{kind=link}
Comments
Please log in or sign up to comment.