/*
=======================================
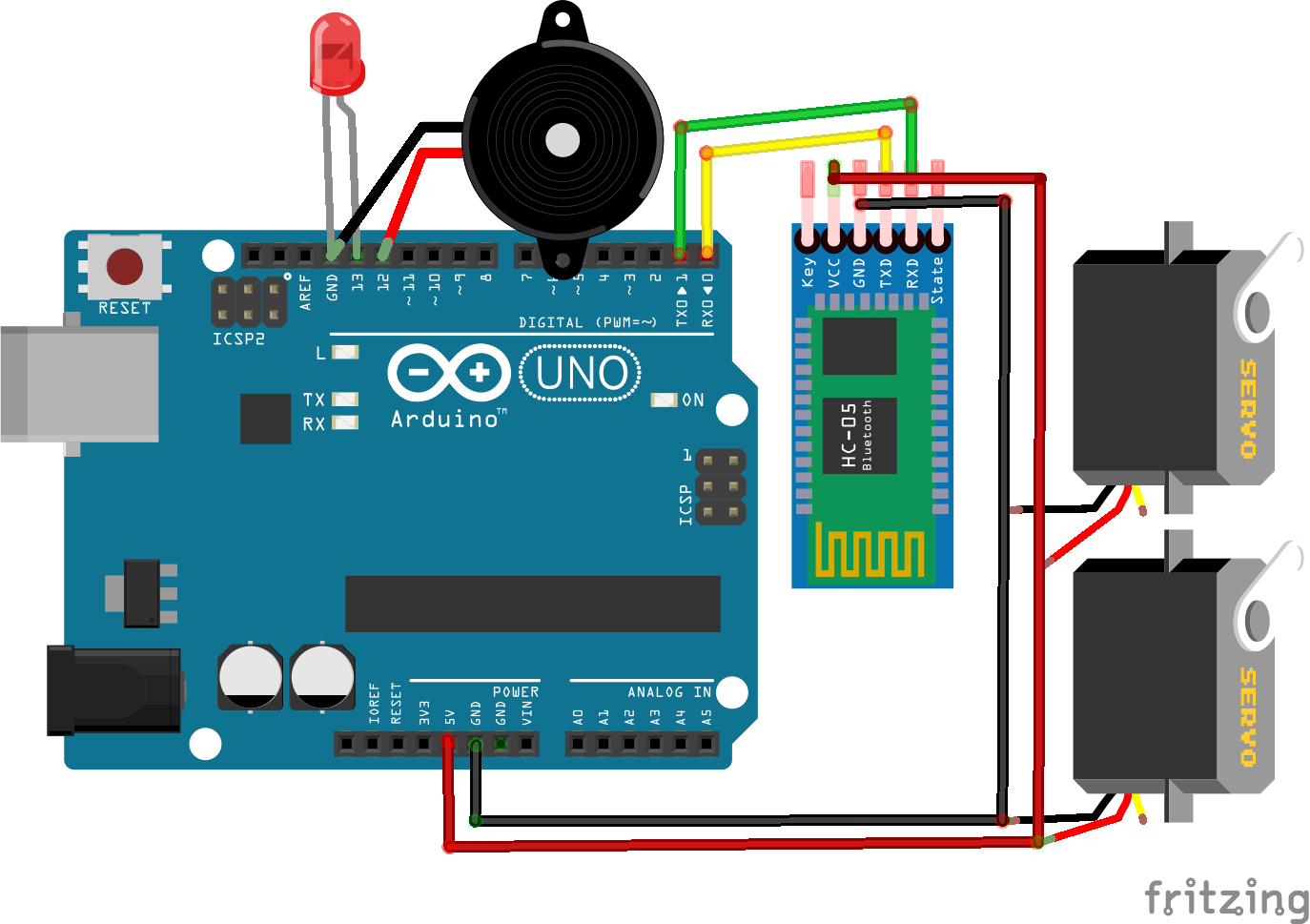
Semaphore_Bot
Lintang Wisesa
simpLINnovation
2016
=======================================
*/
#include <Servo.h> // Ini library motor servo
Servo servoKA, servoKI; // kenalkan servoKA (kanan) & servoKI (kiri)
int led =13; // led + di pin 13
int buz =12; // buzzer + pin 12
char input;
void setup(){
servoKA.attach(5); // SIG servoKA di pin 5
servoKI.attach(6); // SIG servoKI di pin 6
servoKA.write(0); // posisi awal servoKA di sudut 0 derajat
servoKI.write(180); // posisi awal servoKA di sudut 180 derajat
pinMode (led,OUTPUT);
pinMode (buz,OUTPUT);
Serial.begin(9600); // Baudrate-nya 9600 bps.
}
void loop () {
if (Serial.available()) {
input = Serial.read(); // baca input di serial monitor
if (input == 'a' || input == 'A') {lA();} //Jika "a/A" maka 1A
if (input == 'b' || input == 'B') {lB();}
if (input == 'c' || input == 'C') {lC();}
if (input == 'd' || input == 'D') {lD();}
if (input == 'e' || input == 'E') {lE();}
if (input == 'f' || input == 'F') {lF();}
if (input == 'g' || input == 'G') {lG();}
if (input == 'h' || input == 'H') {lH();}
if (input == 'i' || input == 'I') {lI();}
if (input == 'j' || input == 'J') {lJ();}
if (input == 'k' || input == 'K') {lK();}
if (input == 'l' || input == 'L') {lL();}
if (input == 'm' || input == 'M') {lM();}
if (input == 'n' || input == 'N') {lN();}
if (input == 'o' || input == 'O') {lO();}
if (input == 'p' || input == 'P') {lP();}
if (input == 'q' || input == 'Q') {lQ();}
if (input == 'r' || input == 'R') {lR();}
if (input == 's' || input == 'S') {lS();}
if (input == 't' || input == 'T') {lT();}
if (input == 'u' || input == 'U') {lU();}
if (input == 'v' || input == 'V') {lV();}
if (input == 'w' || input == 'W') {lW();}
if (input == 'x' || input == 'X') {lX();}
if (input == 'y' || input == 'Y') {lY();}
if (input == 'z' || input == 'Z') {lZ();}
if (input == '1') {n1();} // jika angka 1 maka n1
if (input == '2') {n2();}
if (input == '3') {n3();}
if (input == '4') {n4();}
if (input == '5') {n5();}
if (input == '6') {n6();}
if (input == '7') {n7();}
if (input == '8') {n8();}
if (input == '9') {n9();}
if (input == '0') {n0();}
if (input == ' ') {spasi();} // spasi
Serial.println (input); // print di serial monitor
}
}
// deretan fungsi
void lA() {
servoKA.write(45); // servoKA di 45 derajat
servoKI.write(180); // servoKI di 180 derajat
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
} // Semaphore & morse "A"
void lB() {
servoKA.write(90);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lC() {
servoKA.write(135);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lD() {
servoKA.write(180);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lE() {
servoKA.write(0);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lF() {
servoKA.write(0);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lG() {
servoKA.write(0);
servoKI.write(135);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lH() { // BELUM BENAR!
servoKA.write(90);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lI() { //BELUM BENAR!
servoKA.write(135);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lJ() {
servoKA.write(180);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lK() {
servoKA.write(45);
servoKI.write(0);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lL() {
servoKA.write(45);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lM() {
servoKA.write(45);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lN() {
servoKA.write(45);
servoKI.write(135);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lO() { //BELUM BENAR!
servoKA.write(135);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lP() {
servoKA.write(90);
servoKI.write(0);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lQ() {
servoKA.write(90);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lR() {
servoKA.write(90);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lS() {
servoKA.write(90);
servoKI.write(135);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lT() {
servoKA.write(135);
servoKI.write(0);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lU() {
servoKA.write(135);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lV() {
servoKA.write(180);
servoKI.write(135);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lW() { //BELUM BENAR!
servoKA.write(0);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lX() { //BELUM BENAR!
servoKA.write(0);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lY() {
servoKA.write(135);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void lZ() { //BELUM BENAR!
servoKA.write(0);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n1() {
servoKA.write(45); // servoKA di 45 derajat
servoKI.write(180); // servoKI di 180 derajat
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
} // Semaphore "1"
void n2() {
servoKA.write(90);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n3() {
servoKA.write(135);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n4() {
servoKA.write(180);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n5() {
servoKA.write(0);
servoKI.write(45);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n6() {
servoKA.write(0);
servoKI.write(90);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n7() {
servoKA.write(0);
servoKI.write(135);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n8() { // BELUM BENAR!
servoKA.write(90);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(300);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
}
void n9() { //BELUM BENAR!
servoKA.write(135);
servoKI.write(180);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
delay(300);
digitalWrite(led,HIGH);
digitalWrite(buz,HIGH);
delay(600);
digitalWrite(led,LOW);
digitalWrite(buz,LOW);
...
This file has been truncated, please download it to see its full contents.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}
Comments