


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
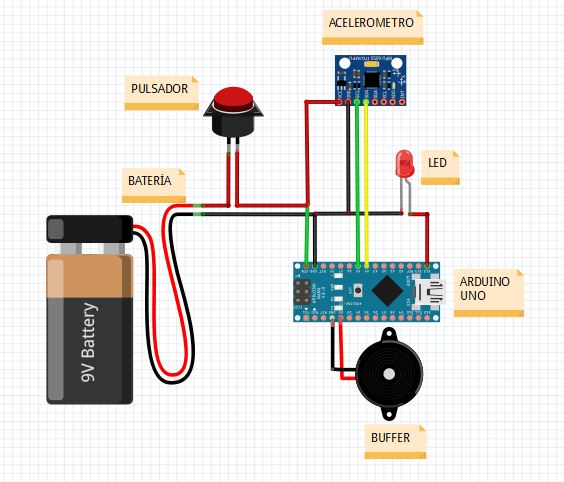
the SOS alarm, comes in my mind for a device that help people avoid bikes thefts.
This is a simple alarm system made with help of buzzer, LED and a motion detector. One can stop the buzzer by pressing the button.
The setup is now ready. Now load the code in Arduino IDE and then Upload it to Arduino. Check the Serial Monitor readings. Try moving the alarm of the sensor and the buzzer should ring.
it comes with the 3D designs ready for print for attach to the bike seat.
Tip: You can fix this alarm.
collaborate:
https://paypal.me/sinester09?locale.x=es_XC
check the video below:
https://youtube.com/shorts/FIPXjNH8bkk?feature=share
THE SOS CASE



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.