Papercut is a craft cut on paper media with the initial stage of making the design is done still manually. It is in less effective and efficient value. By utilizing the CNC machine workmanship will be more quickly resolved, but the price in the market this machine is still relatively expensive for small size. To meet the needs of papercut craftsmen then need to make a CNC machine that is specially for papercut manufacture of course with a much more affordable price.
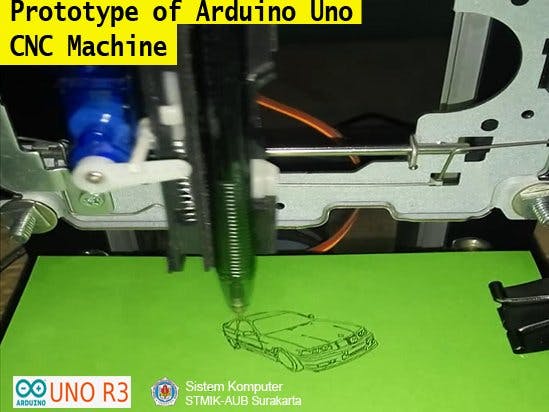
The main purpose of this research is to design and make Prototype of CNC Machine Based Arduino Uno for the purpose of making design or pattern of papercut craft which can work automatically, both for mass production and production of job order. Especially products that have intricate designs and require precise precision.
The research method used in this thesis is descriptive method. Overall the tool is divided into circuit blocks, including: inputs, process units, and outputs. The input consists of Shield L293D as the command giver to the part of the process unit to be processed by the process unit ie Arduino Uno R3. The output block is Motor Stepper X, Y and Motor Servo Z to execute the program command given. With this machine is expected to provide solutions for Papercut craftsmen so that the design stage / pattern is not done manually.
The result of this research is Prototype of Arduino Uno CNC Machine that can create and print pattern or drawing design automatically in complete with motor rotation speed setting. It can be concluded that the machine is designed using two stepper motors as a drive on the X axis and Y axis, and a DC motor is parallel to the X, Y position used for printing. The step position of the motor will be represented in the 2D coordinate model on a millimeter scale. The data entered is then sent via serial communication to the microcontroller as the control center of the machine.

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
Comments