



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 80 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
In my school, we have more than 2,000 students. In the morning their parents will drive and drop their children at school but some parents park in prohibited areas that do not allow parking because it will cause traffic jams and obstruct the flow of traffic.
This project is to make system that can detect illegal car parking in the street area. Using AI camera (DF Robot Huskylens) cooperate with ESP32 and Arduino Cloud. This system will detect and predict that if the car is parking in prohibit area and give a warning to notified car driver.
This Project main component is come from Hackster EEDU Kit - Getting started with AI
I used every component and parts that come in this package in this project.
The system separate to 2 build project part. Smart AI Camera Pole and Smart Warning Sign pole.
1. Smart AI Camera Pole:
This active Smart AI Camera Pole is a system that detected the car that parking in prohibited area and reports to Arduino cloud. This system integrate with DF Robot Huskylens , DF Robot Firebeetle ESP32 , Power Regulator and housing.
Huskylens connected to FireBeetle 2 with i2c interface that available pin on IO Shield. 5V regulator is supply power from 12V SLA battery to Huskylens and FireBeetle 2.
For protect Huskylens and FireBeetle Esp, I used a CCTV housing and put all components in it. It work very well.
Software on Smart AI Camera Pole is written using Arduino cloud IOT. I create the things and link it to FireBeetle-ESP32 device. I create 3 cloud variable
- CommandStat (bool) : This variable is to set to true if want to set warning pole to active light and sound.
- DetecStatus (bool) : This variable is to set to true to indicate that car was detected in no parking area.
I also make simple dashboard that show indicator when car parking is detected and indicator that warning pole is active. Car Detected Status widgets is link to DetectStatus variable and PoleActive is link to CommandStat variable.
2. Smart Warning Sign pole
This smart parking sign is a system that receives orders by Arduino cloud and Flash a warning light and play a warning sound. This system integrates with DF Robot DFPlayer pro, DF Robot Firebeetle ESP32 , Power Regulator , Relay and Light warning signed pcb.
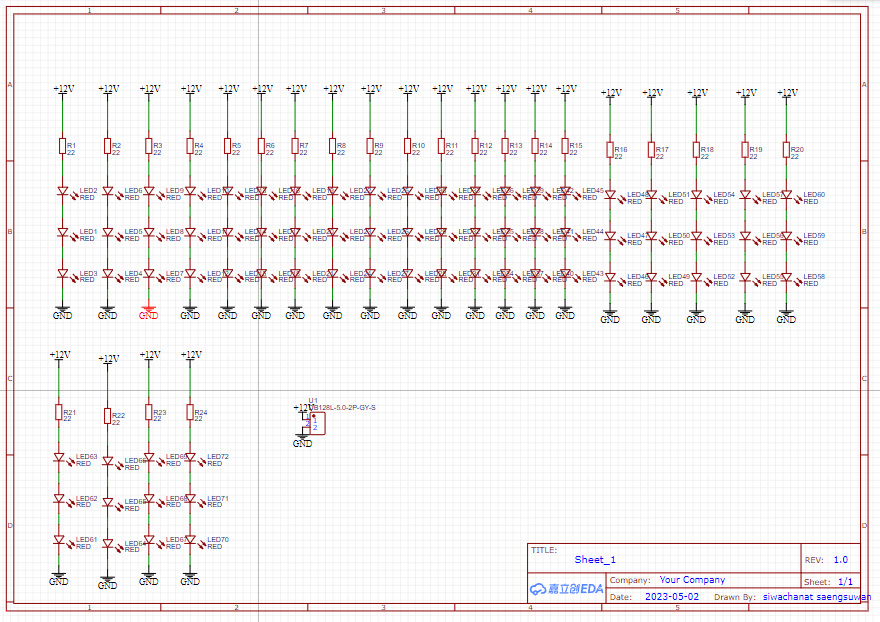
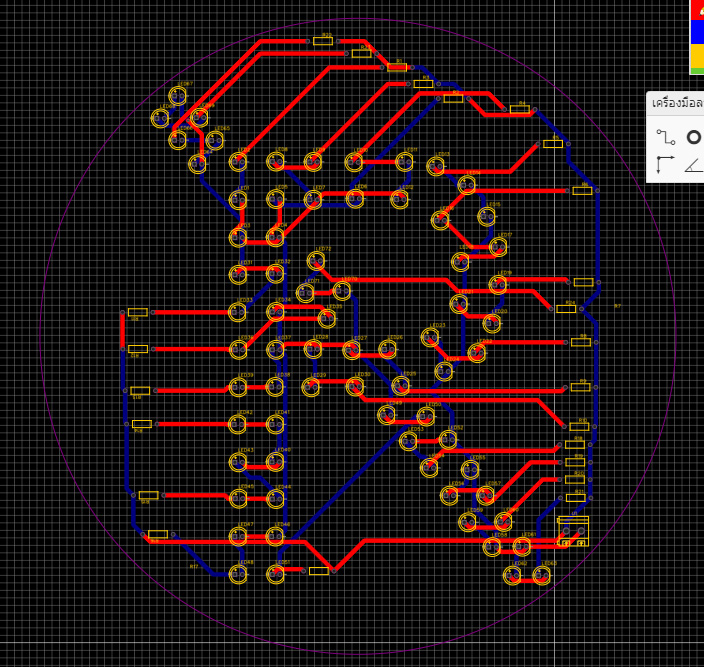
For light warning sign , I designed a circuit using 3 leds series together connect to 300 Ohm Resistor which make it can use with 12V battery directly. I make an array of led light and make it to no parking sign. I designed a PCB and build a warning light. I print 3D for light pcb housing.
Both the warning pole and AI Camera pole will share variable name commandStat. When AI Camera pole update commandStat to
"true" then the warning pole will update and turn on light and warning sound.
In conclusion, This project worked very nicely. It is easy to build and developed using Hackster EEDU Kit - Getting started with AI . There is a lot that can be improved in the future. such as changing bigger loudspeaker and amplifier so the warning sound can be louder. Put solar cells on it so it can have a self-power charger. So I hope this project will help my school improve traffic control in the future.
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.