//code by Ranjith Reddy
//email me at : meetranjithreddy@gmail.com
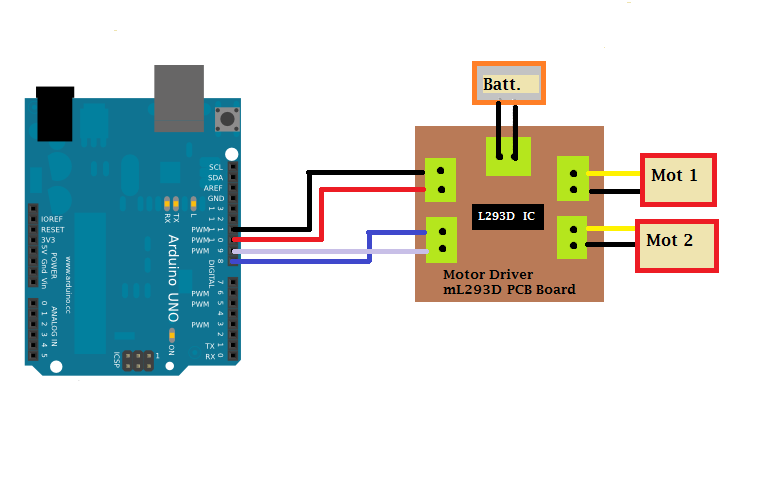
//connect motordriver to 8,9,10,11 digitial pins of arduino
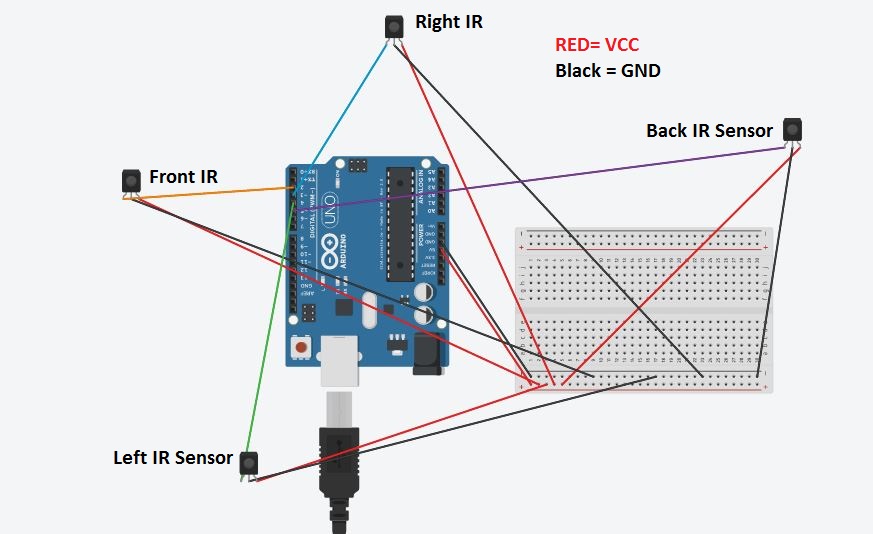
//connect front ir sensor to 2 digitial pin of arduino
//connect right ir sensor to 3 digitial pin of arduino
//connect back ir sensor to 4 digitial pin of arduino
//connect left ir sensor to 5 digitial pin of arduino
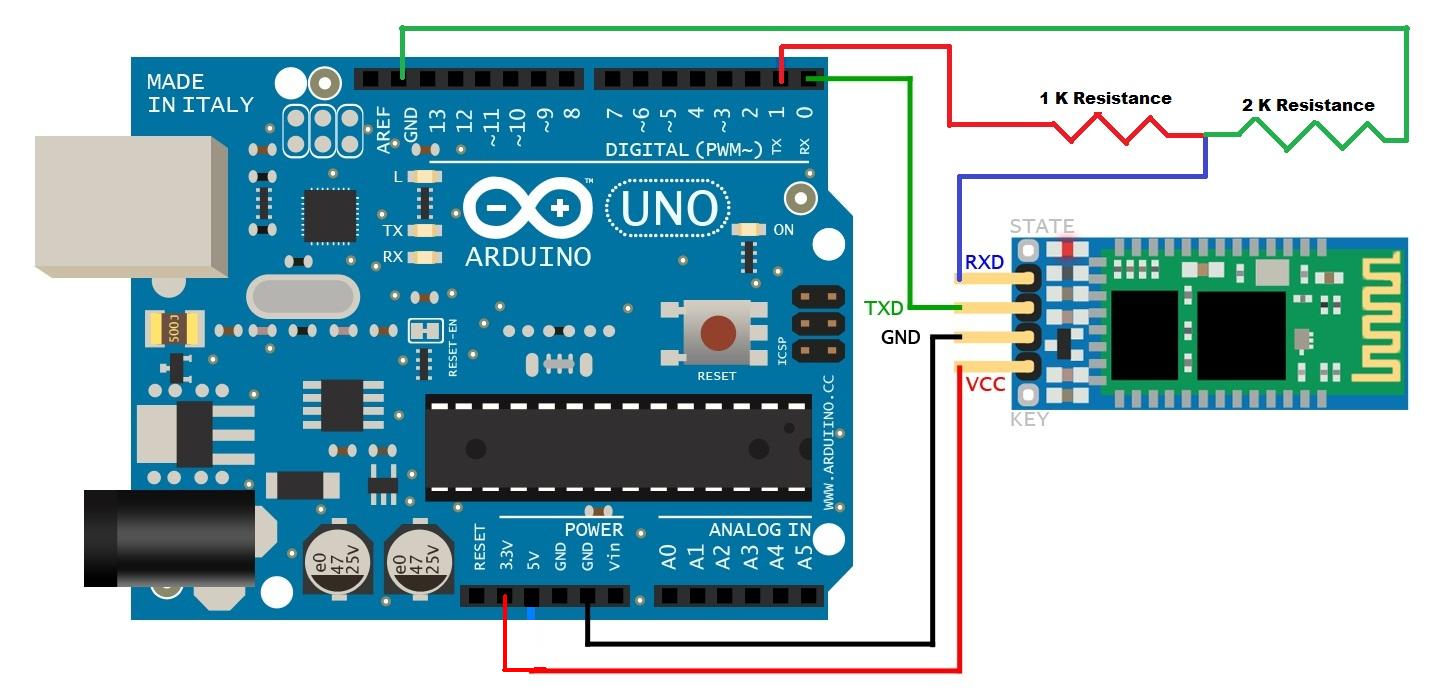
////connect Rx pin of arduino to Tx pin of hc-05 bluetooth trans-reciever
////connect Tx pin of arduino to Rx pin of hc-05 bluetooth trans-reciever
int LmotorUp = 10; //initialising Arduino port 10 be be called as LmotorUp
int LmotorDn = 11; //initialising Arduino port 11 be be called as LmotorDn
int RmotorUp = 8; //initialising Arduino port 8 be be called as RmotorUp
int RmotorDn = 9; //initialising Arduino port 9 be be called as RmotorDn
int ir1 = 2;
int ir2 = 3;
int ir3 = 4;
int ir4 = 5;
int ir11 = HIGH;
int ir12 = HIGH;
int ir13 = HIGH;
int ir14 = HIGH;
void setup()
{
Serial.begin(9600);
pinMode(LmotorUp,OUTPUT);//Setting ports as OUTPUTS as they
pinMode(LmotorDn,OUTPUT);//supply signal values to motor driver
pinMode(RmotorUp,OUTPUT);
pinMode(RmotorDn,OUTPUT);
pinMode(ir1,INPUT);
pinMode(ir2,INPUT);
pinMode(ir3,INPUT);
pinMode(ir4,INPUT);
Serial.println("<Robot name> Welcomes you"); //begining statement because i can :P
delay(1000);
}
void loop()
{
if(Serial.available()>0)//Checking is Serial data available
ir11= digitalRead(ir1);
ir12= digitalRead(ir2);
ir13= digitalRead(ir3);
ir14= digitalRead(ir4);
{
int input = Serial.read(); //Storing value of read data into variable assigned
switch(input)
{
case 'w' : MoveF(); //Calling respective functions if mathced with case label
break;
case 's' : MoveB(); // here is it important to use '' as that stores the ASCII value is the letter in the variable
break;
case 'a' : MoveL(); // and hence we can use the int keyword
break;
case 'd' : MoveR();
break;
case 'x' : Stop();
break;
default : break;
}
}
delay(50);
}
void MoveF()
{
ir11 = digitalRead(ir1);
if (ir11 == HIGH )
{
Serial.println("<Robot Name> Forward");
digitalWrite(LmotorUp,HIGH); //As said in video we are writing a Digital HIGH to the upper left pin of the motor driver
digitalWrite(LmotorDn,LOW); //As said in video we are writing a Digital LOW to the lower left pin of the motor driver
digitalWrite(RmotorUp,HIGH); //As said in video we are writing a Digital HIGH to the upper right pin of the motor driver
digitalWrite(RmotorDn,LOW); //As said in video we are writing a Digital LOW to the lower right pin of the motor driver
delay (2000);
digitalWrite(LmotorUp,LOW);//Writing a digital LOW to all pins associated with movement of motor driver causes all motors to stop
digitalWrite(LmotorDn,LOW);
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,LOW);
}
else {
Serial.println("<Robot Name> forward obstricle");
}
}
void MoveB()
{
ir13 = digitalRead(ir3);
if (ir13 == LOW )
{
Serial.println("<Robot Name> Backward");
digitalWrite(LmotorUp,LOW); //Reverse logic of above
digitalWrite(LmotorDn,HIGH);
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,HIGH);
delay (2000);
digitalWrite(LmotorUp,LOW);//Writing a digital LOW to all pins associated with movement of motor driver causes all motors to stop
digitalWrite(LmotorDn,LOW);
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,LOW);
}
else {
Serial.println("<Robot Name> backward obstricle");
}
}
void MoveL()
{
ir14 = digitalRead(ir4);
if (ir14 == LOW )
{
Serial.println("<Robot Name> Left");
digitalWrite(LmotorUp,LOW); //we are completely stopping the left motor and allowing the right motor to move forward
digitalWrite(LmotorDn,LOW); //this will cause the robot to move left
digitalWrite(RmotorUp,HIGH);
digitalWrite(RmotorDn,LOW);
delay (1000);
digitalWrite(LmotorUp,LOW);//Writing a digital LOW to all pins associated with movement of motor driver causes all motors to stop
digitalWrite(LmotorDn,LOW);
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,LOW);
}
else {
Serial.println("<Robot Name> Leftside obstricle");
}
}
void MoveR()
{
ir12 = digitalRead(ir2);
if (ir12 == LOW )
{ Serial.println("<Robot Name> Right");
digitalWrite(LmotorUp,HIGH);//we are completely stopping the right motor and allowing the left motor to move forward
digitalWrite(LmotorDn,LOW);//this will cause the robot to move right
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,LOW);
delay (1000);
digitalWrite(LmotorUp,LOW);//Writing a digital LOW to all pins associated with movement of motor driver causes all motors to stop
digitalWrite(LmotorDn,LOW);
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,LOW);
}
else {
Serial.println("<Robot Name> Rightside obstricle");
}
}
void Stop()
{
Serial.println("<Robot Name> Stop");
digitalWrite(LmotorUp,LOW);//Writing a digital LOW to all pins associated with movement of motor driver causes all motors to stop
digitalWrite(LmotorDn,LOW);
digitalWrite(RmotorUp,LOW);
digitalWrite(RmotorDn,LOW);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments