int vSpeed = 110; // MAX 255
int turn_speed = 230; // MAX 255
int turn_delay = 10;
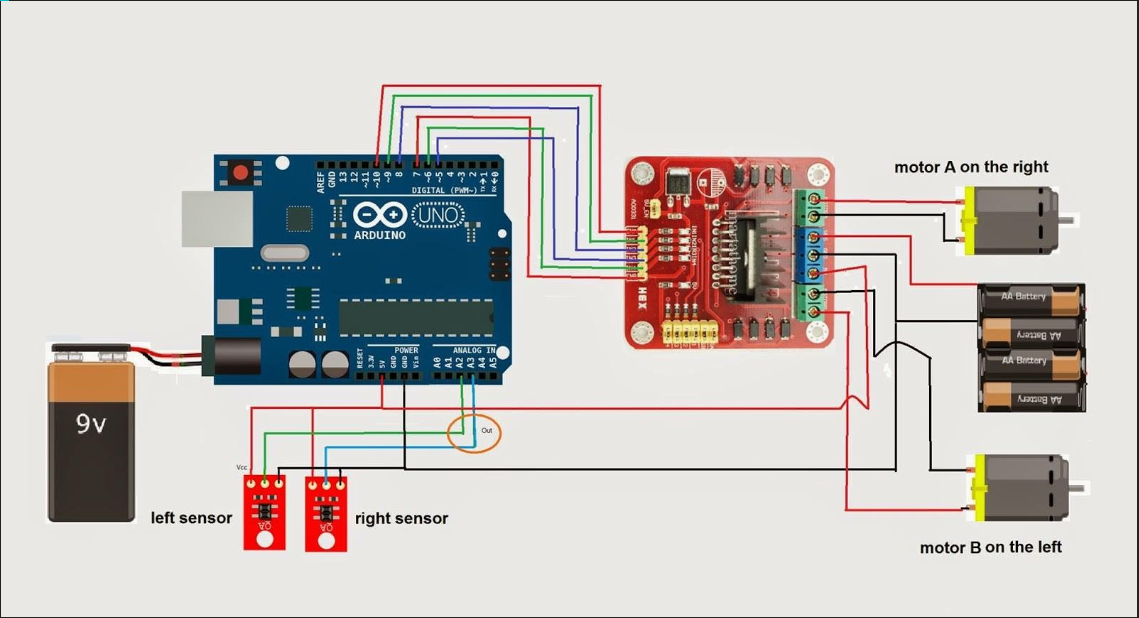
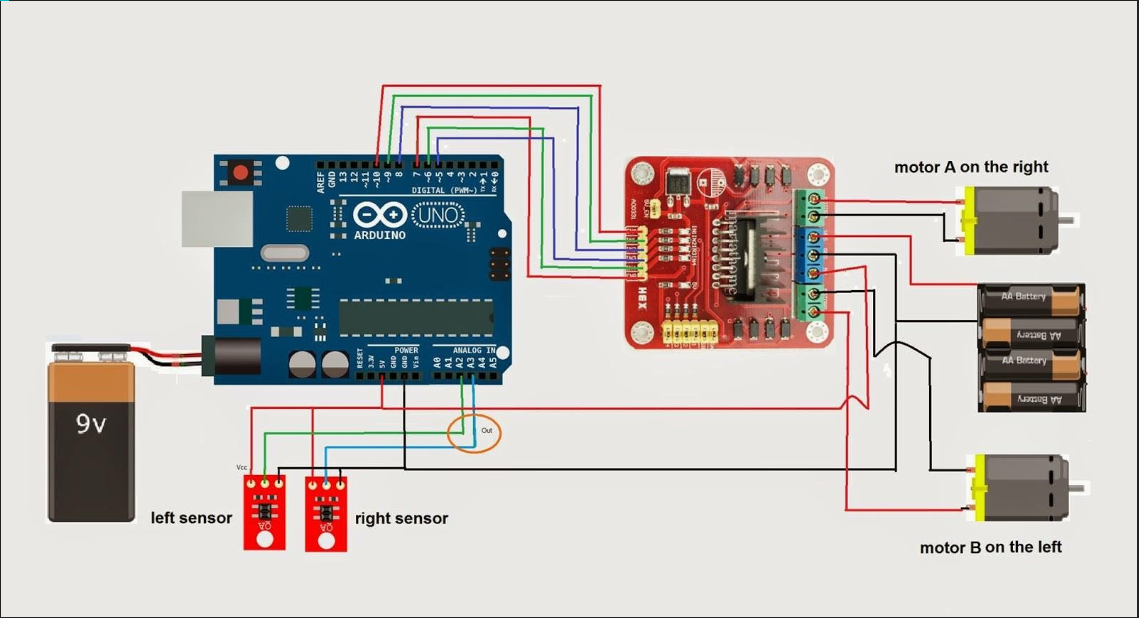
//L293 Connection
const int motorA1 = 8;
const int motorA2 = 10;
const int motorAspeed = 9;
const int motorB1 = 12;
const int motorB2 = 13;
const int motorBspeed = 11;
//Sensor Connection
const int left_sensor_pin =A0;
const int right_sensor_pin =A1;
int left_sensor_state;
int right_sensor_state;
void setup() {
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
Serial.begin(9600);
delay(3000);
}
void loop() {
left_sensor_state = analogRead(left_sensor_pin);
right_sensor_state = analogRead(right_sensor_pin);
if(right_sensor_state > 500 && left_sensor_state < 500)
{
Serial.println("turning right");
digitalWrite (motorA1,LOW);
digitalWrite(motorA2,HIGH);
digitalWrite (motorB1,LOW);
digitalWrite(motorB2,HIGH);
analogWrite (motorAspeed, vSpeed);
analogWrite (motorBspeed, turn_speed);
}
if(right_sensor_state < 500 && left_sensor_state > 500)
{
Serial.println("turning left");
digitalWrite (motorA1,HIGH);
digitalWrite(motorA2,LOW);
digitalWrite (motorB1,HIGH);
digitalWrite(motorB2,LOW);
analogWrite (motorAspeed, turn_speed);
analogWrite (motorBspeed, vSpeed);
delay(turn_delay);
}
if(right_sensor_state > 500 && left_sensor_state > 500)
{
Serial.println("going forward");
digitalWrite (motorA2,LOW);
digitalWrite(motorA1,HIGH);
digitalWrite (motorB2,HIGH);
digitalWrite(motorB1,LOW);
analogWrite (motorAspeed, vSpeed);
analogWrite (motorBspeed, vSpeed);
delay(turn_delay);
}
if(right_sensor_state < 500 && left_sensor_state < 500)
{
Serial.println("stop");
analogWrite (motorAspeed, 0);
analogWrite (motorBspeed, 0);
}
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.