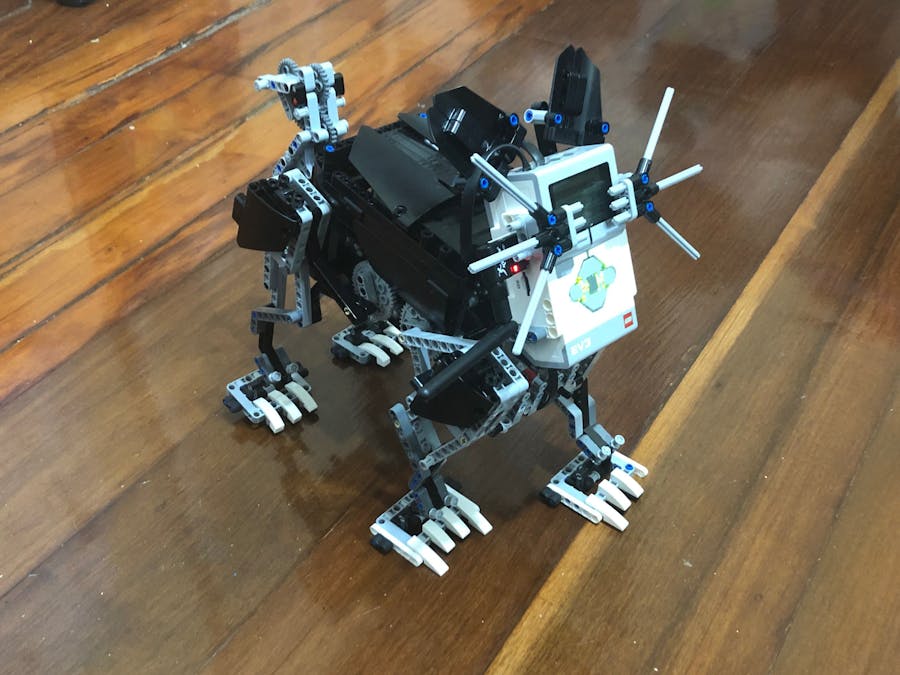
Our project aims to be as similar to a real-life cat as possible. We decided to make it because all of our team mates love cats. Ana goes often to a cat shelter near her house to pet and help them be more social and Eduardo has adopted a pregnant kitten and now take care of five cats in total. Our first source of inspiration was Mindstorms Puppy Model and Eduardo mixed some of the pieces and transformed it into a kitten. Once we started the Alexa Challenge, the team decided that it would be cool if the cat could walk, so we were inspired by Mindstorms Elephant Model and even used some of this construction core into our own, but, in the end, Samantha (which is the name of our robotic cat inspired by one of Eduardo’s kittens) turned out very different from what we had first imagined.
Samantha was made using one EV3, one large motor (used for the paws’ movement), one medium motor (used for the tail movement), one touch sensor (used to make the experience to pet the robot more real) and one wifi dongle (used to make the connection between the EV3 and Alexa more strong. Our robotic cat works by voice command directed towards Alexa, which was coded to understand words such as “tail up”, “tail down”, and standard Alexa Challenge commands, such as “forward” and “backward”. However, we discarded commands concerning directions, for example “left” and “right” since we use only one motor for the paws’ movement.








{kind=link}


Comments
Please log in or sign up to comment.