/*
Camera Shield Example
This example shows an application on 1Sheeld's camera shield.
By using this example, you can take a photo using your phone's
camera if the light sensor reads data above a certain threshold.
*/
/* Include 1Sheeld library. */
#include <OneSheeld.h>
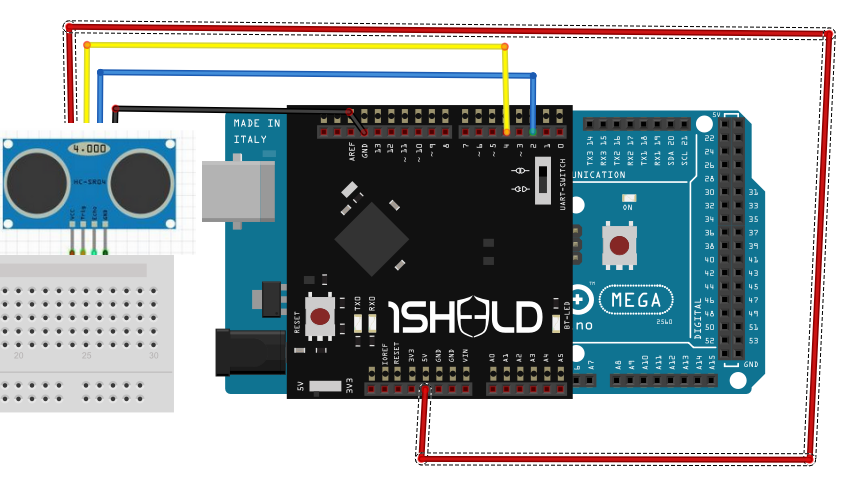
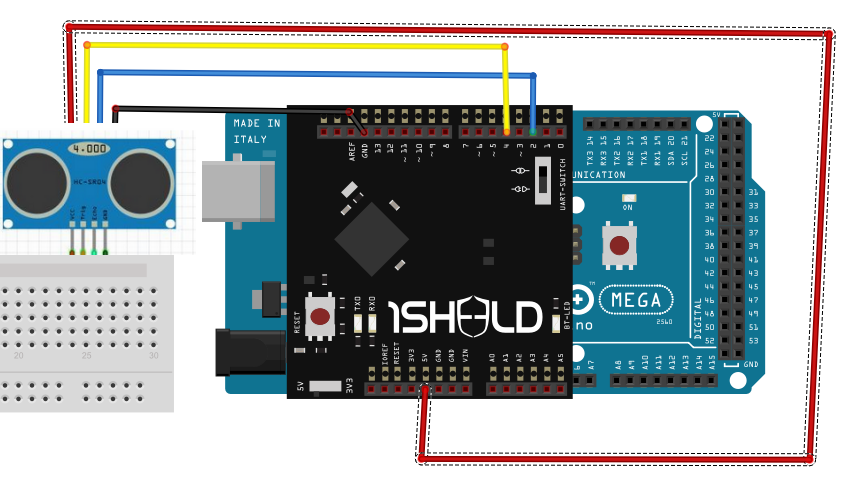
const int trigPin = 2;
const int echoPin = 4;
void setup()
{
/* Start communication. */
OneSheeld.begin();
}
void loop()
{
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, cm;
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(trigPin, OUTPUT);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// convert the time into a distance
cm = microsecondsToCentimeters(duration);
/* Always get the value of the light sensor and make sure it is in a certain range. */
if(cm < 100 && cm > 30)
{
Terminal.println("Photo will be taken");
/* Turn on the camera's flash while capturing. */
Camera.setFlash(ON);
/* Take a photo using the phone's rear camera. */
Camera.rearCapture();
/* Delay for 5 seconds. */
String status = "status to be written to facebook along the picture";
Twitter.tweetLastPicture(status , 0/1);
}
delay(100);
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.