


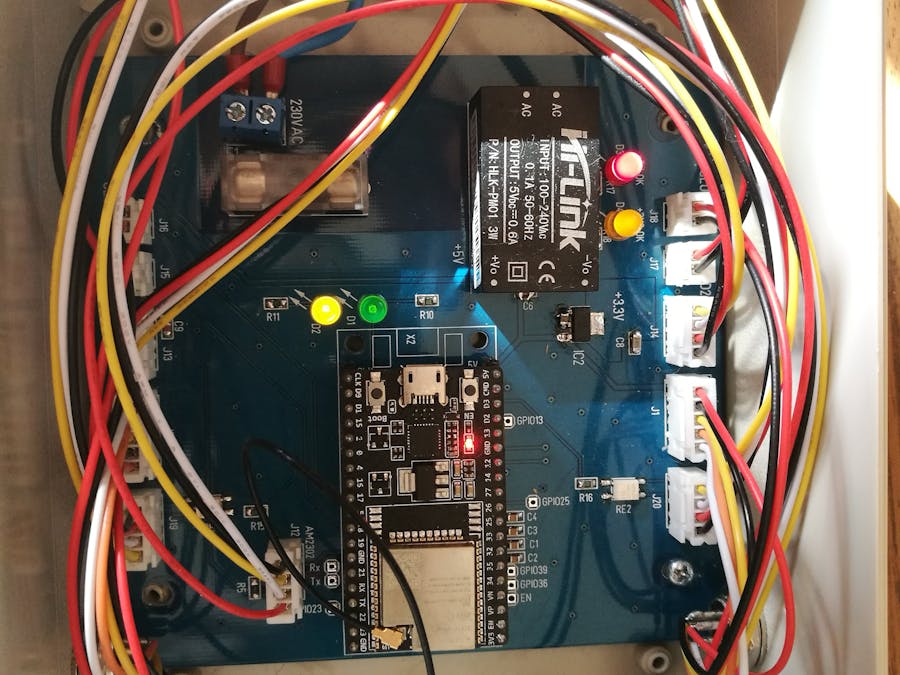
Now I have 2 news automatic garage doors and wanna to check wherever I am in the world if they are closed or opened. The goal after checking it works is to be able to use MQTT to close or open each door
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Garage Door management
// GRA
// 02.12.2018
// V1.0
// Connect to MQTT server and subscribe to topic
// Paramtres de programmations : ESP32 DEV module, QIO, 4MB, Dfaut, 80MHz, Disabled, 921600 Bauds
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#include "WiFi.h"
#include <PubSubClient.h>
//#include "esp_system.h"
#include "Wire.h"
//#include <DHT.h>
#include <pthread.h>
//#include "Adafruit_HTU21DF.h"
#define OPEN_D1 18
#define CLOSE_D1 19
#define OPEN_D2 5
#define CLOSE_D2 17
#define REL_D1 16
#define REL_D2 10
#define BUTTON_PIN 0
#define ROTAT_D11 32
#define ROTAT_D12 33
#define ROTAT_D21 35
#define ROTAT_D22 34
#define US_D1_TRIG 27
#define US_D1_ECHO 26
#define US_D2_TRIG 25
#define US_D2_ECHO 14
#define MASQ_D1 0b1100
#define MASQ_D2 0b0011
#define LEDJ 2
//#define DHTPIN 22
//#define DHTTYPE DHT22 // DHT22 (AM2302)
//#define ENCODERMAX 100 // Valeur max pour 100% ouvert
#define OUVERTURE 0b01010101
#define FERMETURE 0b00110011
#define NBMESENCODER 500000
//DHT dht(DHTPIN, DHTTYPE);
Adafruit_HTU21DF htu = Adafruit_HTU21DF();
// Ponthaux
const char* ssid = "YourSSID";
const char* password = "YourPwd";
const char* server = "YourMQTTserverIP";
const char* topicopenclosed1 = "garage/openclose-d1";
const char* topicopenclosed2 = "garage/openclose-d2";
const char* topicgarage = "garage/commande";
const char* topiccar1 = "garage/car1";
const char* topiccar2 = "garage/car2";
String swVersion = "V1.0";
String hwVersion = "V1.0";
String payload = "";
String sensD1 = "";
String sensD2 = "";
String msgReceived = "";
String statusD1 = "";
String statusD2 = "";
unsigned long sleepTimeS = 5; //300 = 5mn, 600 = 10mn, 1800 = 30mn, 3600 = 1h
bool readTempHumid = false;
char message_buff[1]; // initialise storage buffer (i haven't tested to this capacity.)
byte magnetSensors = 0x0; // Etat des capteurs magntiques des portes ouvert/ferm
byte rotaryEncoderD1 = 0;
byte rotaryEncoderD2 = 0;
//byte buttonPin = 0; // Etat du bouton pour checker son tat
byte dirD1 = 0; //01010101 = fermeture, 00110011 = ouverture
byte dirD2 = 0; //01010101 = fermeture, 00110011 = ouverture
//int interruptionD1 = 0; // Si une interruption dtecte, ++ cette variable
//int interruptionD2 = 0; // Si une interruption dtecte, ++ cette variable
//int interruption = 0;
long incrementD1 = 0;
//long oldincrementD1 = 0;
long incrementD2 = 0;
//long oldincrementD2 = 0;
long pourcentage = 0;
long lastReconnectAttempt = 0;
long durationD1, distanceD1; // Mesure D1 US
long durationD2, distanceD2; // Mesure D2 US
long distance = 0;
long nbMesTempHumid = 15000000;
int car1 = 0; // voiture prsente ou non dans le garage
int car2 = 0;
void callback(char* topic, byte* payload, unsigned int length);
void startInterrupt(void);
void stopInterrupt(void);
WiFiClient wifiClient;
PubSubClient client(server, 1883, callback, wifiClient);
///////////////////////////////////////////////////////////////
// Convert Mac adress to string
///////////////////////////////////////////////////////////////
String macToStr(const uint8_t* mac)
{
String result;
for (int i = 0; i < 6; ++i) {
result += String(mac[i], 16);
if (i < 5)
result += ':';
}
return result;
}
///////////////////////////////////////////////////////////////
// Connect to wifi
///////////////////////////////////////////////////////////////
void connectwifi()
{
int cnt = 0;
int cnt2 = 0;
Serial.print("Connecting to ");
Serial.print(ssid);
WiFi.mode(WIFI_STA); // 26.05.2018 Mettre en station et non AP pour ne pas tre piratable
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED)
{
digitalWrite(LEDJ,HIGH);
delay(100);
digitalWrite(LEDJ,LOW);
Serial.print(".");
cnt += 1;
if(cnt>=1000)
{
Serial.println("connectwifi() : cnt>=300");
if(cnt2 == 10)
{
ESP.restart();
}
delay(1000);
return;
}
}
Serial.println("WiFi connected");
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Generate client name based on MAC address
String clientName;
clientName += "ESP32_";
uint8_t mac[6];
WiFi.macAddress(mac);
clientName += macToStr(mac);
Serial.print("Connecting to ");
Serial.print(server);
Serial.print(" as ");
Serial.println(clientName);
if (client.connect((char*) clientName.c_str()))
{
Serial.println("Connected to MQTT broker");
Serial.print("Topic is: ");
Serial.println(topicgarage);
char* topicTest = "test/test-connexion";
if (client.publish(topicTest, "Starting..."))
{
Serial.println("Publish successfully sent");
client.subscribe(topicgarage);
}
else
{
Serial.println("Publish failed");
}
}
else
{
digitalWrite(LEDJ,HIGH);
delay(100);
Serial.println("MQTT connect failed");
Serial.println("Will reset and try again...");
ESP.restart();
}
}
///////////////////////////////////////////////////////////////
// Callback, quand arrive un message
///////////////////////////////////////////////////////////////
void callback(char* topicCallback, byte* payload, unsigned int length)
{
// Here is what i have been using to handle subscriptions. I took it as a snippet from elsewhere but i cannot credit author as i dont have reference!
int i = 0;
Serial.print("Comparaison de topics : ");
Serial.print(topicgarage);
Serial.print(" et ");
Serial.println(topicCallback);
if (String(topicgarage) == String(topicCallback))
{
Serial.println("Message arrived, topic is : " + String(topicCallback));
// create character buffer with ending null terminator (string)
for(i=0; i<length; i++)
{
message_buff[i] = payload[i];
Serial.print(message_buff[i]);
delay(20);
}
message_buff[i] = '\0';
String msgString = String(message_buff);
Serial.println("Payload: " + msgString);
msgReceived = msgString;
OpenCloseDoors();
}
else
{
Serial.println("Another topic, not for me");
}
//startInterrupt();
}
///////////////////////////////////////////////////////////////
// Reconnect to MQTT client
///////////////////////////////////////////////////////////////
boolean reconnect()
{
Serial.println("Connection loosen, try to reconnect");
ESP.restart();
if (client.connect("ESPClient"))
{
Serial.println("reconnect() : if (client.connect(ESPClient)");
// Once connected, publish an announcement...
client.publish(topicopenclosed1,"Booting doors system, please wait...");
client.publish(topicopenclosed2,"Booting doors system, please wait...");
// ... and resubscribe
client.subscribe(topicgarage);
}
else
{
Serial.println("reconnect() : not connected");
}
delay(500);
return client.connected();
}
///////////////////////////////////////////////////////////////
// rotaryInterrupt
///////////////////////////////////////////////////////////////
/*void readRotaryEncoders(byte door)
{
incrementD1 = 0;
incrementD2 = 0;
long j=0;
for(j=0;j <= NBMESENCODER;j++)
{
//delay(10);
if(door==1)
{
//D1
rotaryEncoderD1 = digitalRead(ROTAT_D11);
rotaryEncoderD1 = (rotaryEncoderD1 << 1) + digitalRead(ROTAT_D12);
//Serial.println(rotaryEncoderD1);
switch(rotaryEncoderD1)
{
case 0:
{
if(rotaryEncoderD1 == 0b00)
{
// pas de mouvement
}
else if(rotaryEncoderD1 == 0b01) // fermeture
{
dirD1 = FERMETURE;
incrementD1++;
}
else if(rotaryEncoderD1 == 0b11) // ouverture
{
// pas de mouvement
}
else if(rotaryEncoderD1 == 0b10)
{
dirD1 = OUVERTURE;
incrementD1--;
}
}
case 1:
{
if(rotaryEncoderD1 == 0b00)
{
dirD1 = FERMETURE;
incrementD1++;
}
else if(rotaryEncoderD1 == 0b01) // fermeture
{
// pas de mouvement
}
else if(rotaryEncoderD1 == 0b11) // ouverture
{
dirD1 = OUVERTURE;
incrementD1--;
}
else if(rotaryEncoderD1 == 0b10)
{
// pas de mouvement
}
}
case 2:
{
if(rotaryEncoderD1 == 0b00)
{
dirD1 = OUVERTURE; // fermeture
incrementD1--;
}
else if(rotaryEncoderD1 == 0b01)
{
// pas de mouvement
}
else if(rotaryEncoderD1 == 0b11)
{
dirD1 = FERMETURE; // ouverture
incrementD1++;
}
else if(rotaryEncoderD1 == 0b10)
{
// pas de mouvement
}
}
case 3:
{
if(rotaryEncoderD1 == 0b00)
{
// pas de mouvement
}
else if(rotaryEncoderD1 == 0b01) // fermeture
{
dirD1 = FERMETURE;
incrementD1++;
}
else if(rotaryEncoderD1 == 0b11) // ouverture
{
// pas de mouvement
}
else if(rotaryEncoderD1 == 0b10)
{
dirD1 = OUVERTURE;
incrementD1--;
}
}
}
}
else if (door == 2)
{
// D2
rotaryEncoderD2 = digitalRead(ROTAT_D21);
rotaryEncoderD2 = (rotaryEncoderD2 << 1) + digitalRead(ROTAT_D22);
//Serial.println(rotaryEncoderD2);
switch(rotaryEncoderD2)
{
case 0:
{
if(rotaryEncoderD2 == 0b00)
{
// pas de mouvement
}
else if(rotaryEncoderD2 == 0b01) // fermeture
{
dirD2 = FERMETURE;
incrementD2++;
}
else if(rotaryEncoderD2 == 0b11) // ouverture
{
// pas de mouvement
}
else if(rotaryEncoderD2 == 0b10)
{
dirD2 = OUVERTURE;
incrementD2--;
}
}
case 1:
{
if(rotaryEncoderD2 == 0b00)
{
dirD2 = FERMETURE;
incrementD2++;
}
else if(rotaryEncoderD2 == 0b01) // fermeture
{
// pas de mouvement
}
else if(rotaryEncoderD2 == 0b11) // ouverture
{
dirD2 = OUVERTURE;
incrementD2--;
}
else if(rotaryEncoderD2 == 0b10)
{
// pas de mouvement
}
}
case 2:
{
if(rotaryEncoderD2 == 0b00)
{
dirD2 = OUVERTURE; // fermeture
incrementD2--;
}
else if(rotaryEncoderD2 == 0b01)
{
// pas de mouvement
}
else if(rotaryEncoderD2 == 0b11)
{
dirD2 = FERMETURE; // ouverture
incrementD2++;
}
else if(rotaryEncoderD2 == 0b10)
{
// pas de mouvement
}
}
case 3:
{
if(rotaryEncoderD2 == 0b00)
{
// pas de mouvement
}
else if(rotaryEncoderD2 == 0b01) // fermeture
{
dirD2 = FERMETURE;
incrementD2++;
}
else if(rotaryEncoderD2 == 0b11) // ouverture
{
// pas de mouvement
}
else if(rotaryEncoderD2 == 0b10)
{
dirD2 = OUVERTURE;
incrementD2--;
}
}
}
}
}
Serial.print("incrementD1 = ");
Serial.println(incrementD1);
Serial.print("incrementD2 = ");
Serial.println(incrementD2);
if(door == 1)
{
if(incrementD1 >= 15000)
//if(dirD1==OUVERTURE)
{
client.publish(topicopenclosed1, "D1 ouverture...");
Serial.println("D1 ouverture");
}
else if(incrementD1 <= -15000)
//else if(dirD1==FERMETURE)
{
client.publish(topicopenclosed1, "D1 fermeture...");
Serial.println("D1 fermeture");
}
}
if(door == 2)
{
if(incrementD2 >= 15000)
//if(dirD2==OUVERTURE)
{
client.publish(topicopenclosed2, "D2 ouverture...");
Serial.println("D2 ouverture");
}
else if(incrementD2 <= -15000)
//else if(dirD2==FERMETURE)
{
client.publish(topicopenclosed2, "D2 fermeture...");
Serial.println("D2 fermeture");
}
}
dirD1 = 0;
dirD2 = 0;
//delay(200);
}*/
///////////////////////////////////////////////////////////////
// readTempHumidPressure, lecture de la temprature et humidit avec 280
///////////////////////////////////////////////////////////////
void readTempHumidPressure(void)
{
double temperature = 0;
double humidity = 0;
temperature = htu.readTemperature();
humidity = htu.readHumidity();
//temperature = dht.readTemperature();
//humidity = dht.readHumidity();
Serial.print("Temperature : ");
Serial.print(temperature);
Serial.print(", Humidity : ");
Serial.println(humidity);
client.publish("temp-humid/garage-humid", String(humidity).c_str());
client.publish("temp-humid/garage-temp", String(temperature).c_str());
}
///////////////////////////////////////////////////////////////
// readUSsensors
///////////////////////////////////////////////////////////////
int readUSsensors(int cars)
{
int distD1 = 0;
int distD2 = 0;
if(cars == 1)
{
//D1
digitalWrite(US_D1_TRIG, LOW);
delayMicroseconds(2);
digitalWrite(US_D1_TRIG, HIGH);
delayMicroseconds(10);
digitalWrite(US_D1_TRIG, LOW);
durationD1 = pulseIn(US_D1_ECHO, HIGH);
distD1 = (durationD1/2) / 29.1;
/*Serial.print("Temps D1 : ");
Serial.print(durationD1);
Serial.print(", Centimeter D1 : ");
Serial.println(distD1);*/
return distD1;
}
else if(cars == 2)
{
//D2
digitalWrite(US_D2_TRIG, LOW);
delayMicroseconds(2);
digitalWrite(US_D2_TRIG, HIGH);
delayMicroseconds(10);
digitalWrite(US_D2_TRIG, LOW);
durationD2 = pulseIn(US_D2_ECHO, HIGH);
distD2 = (durationD2/2) / 29.1;
/*Serial.print("Temps D2 : ");
Serial.print(durationD2);
Serial.print(", Centimeter D2 : ");
Serial.println(distD2);*/
return distD2;
}
}
///////////////////////////////////////////////////////////////
// readMagnetSensors
///////////////////////////////////////////////////////////////
byte readMagnetSensors(void)
{
//Serial.print("readMagnetSensors : ");
byte magnetSensor = 0;
magnetSensor = 0;
magnetSensor = magnetSensor + digitalRead(OPEN_D1);
magnetSensor = magnetSensor << 1;
magnetSensor = magnetSensor + digitalRead(CLOSE_D1);
magnetSensor = magnetSensor << 1;
magnetSensor = magnetSensor + digitalRead(OPEN_D2);
magnetSensor = magnetSensor << 1;
magnetSensor = magnetSensor + digitalRead(CLOSE_D2);
//Serial.println(magnetSensor);
return magnetSensor;
}
///////////////////////////////////////////////////////////////
// Interruptions
///////////////////////////////////////////////////////////////
/*void interruptD1(void)
{
stopInterrupt();
if(digitalRead(ROTAT_D12) == LOW)
{
sensD1 = "fermeture";
}
else
{
sensD1 = "ouverture";
}
}
void interruptD2(void)
{
stopInterrupt();
if(digitalRead(ROTAT_D22) == LOW)
{
sensD2 = "fermeture";
}
else
{
sensD2 = "ouverture";
}
}
void startInterrupt(void)
{
attachInterrupt(ROTAT_D11, interruptD1, FALLING);
attachInterrupt(ROTAT_D21, interruptD2, FALLING);
}
void stopInterrupt(void)
{
detachInterrupt(ROTAT_D11);
detachInterrupt(ROTAT_D21);
}*/
///////////////////////////////////////////////////////////////
// OpenCloseDoors
///////////////////////////////////////////////////////////////
void OpenCloseDoors(void)
{
int i = 0;
if(msgReceived == "openDoor1")
{
magnetSensors = readMagnetSensors();
if((magnetSensors & 12) == 8)
{
Serial.println("D1 dj ouvert");
}
else
{
Serial.println("Action sur la porte D1, puis attente...");
opencloseD1();
for(i=0;i<=100;i++)
{
Serial.println(i);
magnetSensors = readMagnetSensors();
if((magnetSensors & 12) == 4) // Ferm copmplet, relancer l'ouverture
{
i = 100;
Serial.println("D1 ferm, ouverture en cours dans 0.5s...");
delay(500);
opencloseD1();
}
delay(500);
}
msgReceived = "";
}
}
else if(msgReceived == "closeDoor1")
{
if((magnetSensors & 12) == 4)
{
Serial.println("D1 dj ferm");
}
else
{
Serial.println("Fermeture de D1...");
opencloseD1();
for(i=0;i<=100;i++)
{
Serial.println(i);
magnetSensors = readMagnetSensors();
if((magnetSensors & 12) == 8) // Ouvert copmplet, relancer la fermeture
{
break;
Serial.println("D1 ouvert, fermeture en cours dans 0.5s...");
delay(500);
opencloseD1();
}
delay(500);
}
msgReceived = "";
}
}
else if(msgReceived == "openDoor2")
{
if((magnetSensors & 3) == 1)
{
Serial.println("D2 dj ouvert");
}
else
{
Serial.println("Ouverture de D2...");
opencloseD2();
for(i=0;i<=100;i++)
{
Serial.println(i);
//break;
magnetSensors = readMagnetSensors();
if((magnetSensors & 3) == 2) // Ferm copmplet, relancer l'ouverture
{
break;
Serial.println("D2 ferm, ouverture en cours dans 0.5s...");
delay(500);
opencloseD2();
}
delay(500);
}
msgReceived = "";
}
}
else if(msgReceived == "closeDoor2")
{
if((magnetSensors & 3) == 2)
{
Serial.println("D2 dj ferm");
}
else
{
Serial.println("Fermeture de D2...");
opencloseD2();
for(i=0;i<=100;i++)
{
Serial.println(i);
magnetSensors = readMagnetSensors();
if((magnetSensors & 3) == 1) // Ferm copmplet, relancer l'ouverture
{
break;
Serial.println("D2 ouvert, fermeture en cours dans 0.5s...");
delay(500);
opencloseD2();
}
delay(500);
}
msgReceived = "";
}
}
else
{
}
}
void opencloseD1(void)
{
digitalWrite(REL_D1,HIGH);
delay(200);
digitalWrite(REL_D1,LOW);
delay(1000);
}
void opencloseD2(void)
{
digitalWrite(REL_D2,HIGH);
delay(200);
digitalWrite(REL_D2,LOW);
delay(1000);
}
///////////////////////////////////////////////////////////////
// Setup
///////////////////////////////////////////////////////////////
void setup()
{
pinMode(OPEN_D1, INPUT);
pinMode(CLOSE_D1, INPUT);
pinMode(OPEN_D2, INPUT);
pinMode(CLOSE_D2, INPUT);
pinMode(REL_D1, OUTPUT);
pinMode(REL_D2, OUTPUT);
pinMode(BUTTON_PIN, INPUT);
pinMode(ROTAT_D11, INPUT);
pinMode(ROTAT_D12, INPUT);
pinMode(ROTAT_D21, INPUT);
pinMode(ROTAT_D22, INPUT);
pinMode(US_D1_TRIG, OUTPUT);
pinMode(US_D1_ECHO, INPUT);
pinMode(US_D2_TRIG, OUTPUT);
pinMode(US_D2_ECHO, INPUT);
pinMode(LEDJ,OUTPUT);
//dht.begin();
digitalWrite(LEDJ,HIGH);
Serial.begin(115200);
delay(100);
Serial.println();
// Version du soft et HW
Serial.print("ESP32 - Garage Doors SW:");
Serial.print(swVersion);
Serial.print(", HW:");
Serial.println(hwVersion);
connectwifi(); // Connect wifi
if (client.connected()) // Connect to broker
{
if (client.publish(topicgarage, (char*) payload.c_str(),true))
{
Serial.println("Publish ok");
client.subscribe(topicgarage);
}
else
{
Serial.println("Publish failed");
}
}
else
{
Serial.println("Pas de connexion WIFI");
}
delay(100);
if (!htu.begin())
{
Serial.println("Couldn't find sensor!");
}
}
///////////////////////////////////////////////////////////////
// Loop
///////////////////////////////////////////////////////////////
void loop()
{
digitalWrite(LEDJ,HIGH);
if (!client.connected())
{
digitalWrite(LEDJ,LOW);
long now = millis();
if (now - lastReconnectAttempt > 10000)
{
lastReconnectAttempt = now;
Serial.print("Last Reconnect Attempt : ");
Serial.println(lastReconnectAttempt);
// Attempt to reconnect
bool reconnectVar;
reconnectVar = reconnect();
if (reconnectVar = true)
{
digitalWrite(LEDJ,HIGH);
Serial.println("Reconnected");
lastReconnectAttempt = 0;
}
else
{
Serial.println("Reboot module");
digitalWrite(LEDJ,LOW);
ESP.restart();
}
}
}
client.loop();
// Lecture des capteurs
magnetSensors = readMagnetSensors();
Serial.print("Etat capteurs D2: ");
Serial.println(magnetSensors & 3);
Serial.print("Etat capteurs D1: ");
Serial.println(magnetSensors & 12);
if((magnetSensors & 12) == 8) // ouvert completement
{
if(statusD1!="D1 opened")
{
// Lecture de la temp humid pression
Serial.println("D1 opened");
client.publish(topicopenclosed1, "opened");
readTempHumid = true;
statusD1 = "D1 opened";
}
}
else if ((magnetSensors & 12) == 4) // ferm completment
{
if(statusD1!="D1 closed")
{
// Lecture de la temp humid pression
Serial.println("D1 closed");
client.publish(topicopenclosed1, "closed");
readTempHumid = true;
statusD1 = "D1 closed";
}
}
else // sinon, en mouvement, publier le sens en lisant les switch rotatifs
{
Serial.println("D1 en mouvement...");
client.publish(topicopenclosed1, "moving");
statusD1 = "D1 moving";
//readRotaryEncoders(1);
}
//Door 2
if ((magnetSensors & 3) == 1) // ouvert completement
{
if(statusD2!="D2 opened")
{
// Lecture de la temp humid pression
Serial.println("D2 opened");
client.publish(topicopenclosed2, "opened");
statusD2 = "D2 opened";
}
}
else if ((magnetSensors & 3) == 2) // ferm completment
{
//Serial.print("StatusD2 : ");
//Serial.println(statusD2);
if(statusD2!="D2 closed")
{
// Lecture de la temp humid pression
Serial.println("D2 closed");
client.publish(topicopenclosed2, "closed");
statusD2 = "D2 closed";
}
}
else // sinon, en mouvement, publier le sens en lisant les switch rotatifs
{
//Serial.print("StatusD2 : ");
//Serial.println(statusD2);
Serial.println("D2 en mouvement...");
client.publish(topicopenclosed2, "moving");
statusD2 = "D2 moving";
//readRotaryEncoders(2);
}
//Serial.print("StatusD2 : ");
//Serial.println(statusD2);
/*if(dirD1==OUVERTURE) sensD1="Ouverture";
else if (dirD1==FERMETURE)sensD1="Fermeture";
else sensD1="";
if(dirD2==OUVERTURE) sensD2="Ouverture";
else if (dirD2==FERMETURE)sensD2="Fermeture";
else sensD2="";
if(sensD1 != "" || sensD2 != "")
{
Serial.print("D1 = ");
Serial.print(sensD1);
Serial.print(", D2 = ");
Serial.println(sensD2);
if(sensD1 != "")
{
client.publish(topicopenclosed1, sensD1.c_str());
Serial.println("Envoi MQTT de l'tat de D1");
}
if (sensD2 != "")
{
client.publish(topicopenclosed2, sensD2.c_str());
Serial.println("Envoi MQTT de l'tat de D2");
}
sensD1 = "";
sensD2 = "";
}*/
if(nbMesTempHumid >= 15000000) // 15000000 Lire la temprature et humidit rgulirement (environ 15mn)
{
readTempHumid = true;
nbMesTempHumid = 0;
Serial.print("Distance sur D1 et D2... ");
int i = 1;
for(i=1;i<=2;i++)
{
distance = readUSsensors(i);
Serial.println(distance);
if(distance <= 5)
{
client.publish(topiccar1, "Distance read wrong");
}
else if(distance >= 100) // Mesurer en cm, si plus que 1m, pas de voiture, sinon il y a une voiture
{
//Voiture pas l
if(i==1) client.publish(topiccar1, "free");
if(i==2) client.publish(topiccar2, "free");
}
else
{
//Voiture au garage
if(i==1) client.publish(topiccar1, "occuped");
if(i==2) client.publish(topiccar2, "occuped");
}
client.publish(topiccar1,String(distance).c_str());
}
}
else
{
nbMesTempHumid++;
}
// Affichage de la temprature seulement dans certaines conditions
if(readTempHumid == true)
{
readTempHumidPressure();
readTempHumid = false;
}
delay(5000);
if (WiFi.status() != WL_CONNECTED)
{
delay(100);
connectwifi();
}
}

Comments
Please log in or sign up to comment.