The situation of people with disabilities, their needs, and the barriers they face to participating fully in their societies is a critical issue. People with disabilities require the same essentials as those without disabilities. However, they often struggle to meet their needs due to difficulties in moving freely from place to place and the challenges of securing employment. Additionally, societal expectations often perceive individuals with disabilities as dependent and unable to fulfill their needs and wants through their own efforts. Therefore, modifying sewing machines presents an excellent opportunity for individuals with disabilities, particularly those with disabilities affecting both legs. Typically, sewing machines are operated by foot, and sewing work can be performed while sitting in one place, eliminating the need for movement.
The following few stories motivated me to do this project. This project aims to alter societal perceptions by modifying sewing machines to be hand-operated, thus enabling individuals with disabilities to work independently. By adopting the lower part of the sewing machine, which is typically foot-operated, to be hand-operated, people with disabilities can become self-sufficient. This change will help shift their status from dependent to independent, demonstrating that individuals with disabilities can contribute to society equally in terms of work, lifestyle, and meeting their needs and wants.
Currently, all types of sewing machines require the use of legs for operation, making them inaccessible to individuals with leg disabilities. Our modified sewing machine is fully operated by hand and specifically designed for those with disabilities affecting both legs. This innovation will transform the lives of these individuals, increasing their productivity and integrating them into the garment industry, where the ability to sit for extended periods is beneficial.
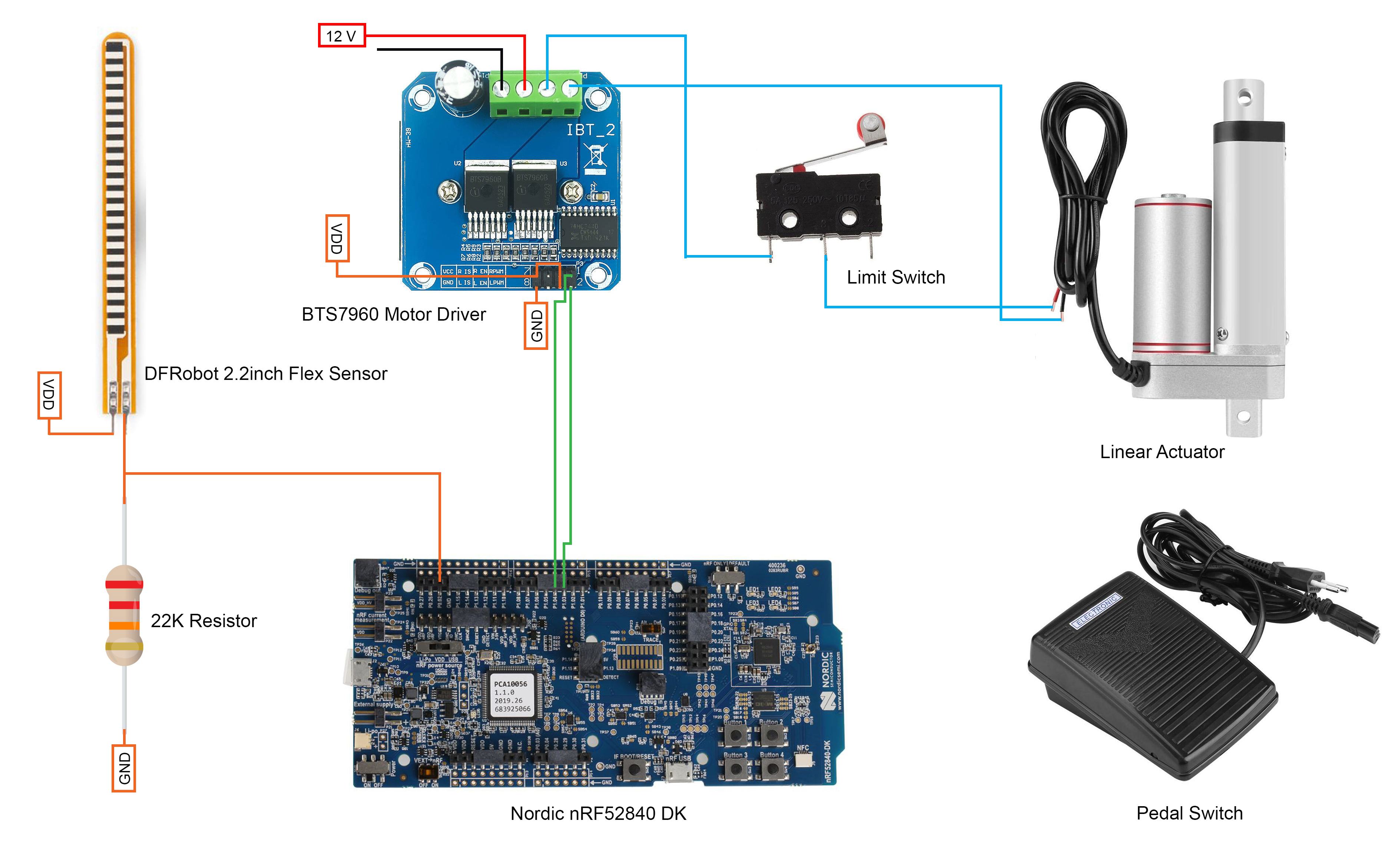
Hardware ConnectionBefore explaining the hardware connections let me explain how the system works. All types of sewing machines have a pedal switch that is used to control the speed of the sewing machine. As leg impairments are unable to control the pedal switch my goal is to make a way that enables the disabled to maintain the pedal in other ways. I used a flex sensor and a linear actuator to control the pedal switch with a finger. The linear actuator pushes the pedal switch based on the bending of the flex sensor and indirectly controls the speed of the sewing machine. The nRF52840 is used here to control the linear actuator based on the flex sensor reading. As a microcontroller pin is not capable of sourcing or sinking the required amount of current of a linear actuator, a high-power motor driver is used to drive and control the direction of the actuator. A limit switch is used to protect the pedal switch from abnormal pressure from the actuator.
The following figure shows the complete connection among the hardware components.
Testing and Writing CodeI made a breadboard setup for testing the sensor and actuator. The sensor connection with nRF52840 is shown in the following image.
The following values were recorded in the serial monitor without bending the sensor which is quite stable.
The maximum voltage around 90-degree bending of the sensor was recorded as 2300mV. Based on the experimental value the code was written and the perfect pressure was achieved after multiple trials and errors. The code is attached in the code section and the complete project is provided with a GitHub link.
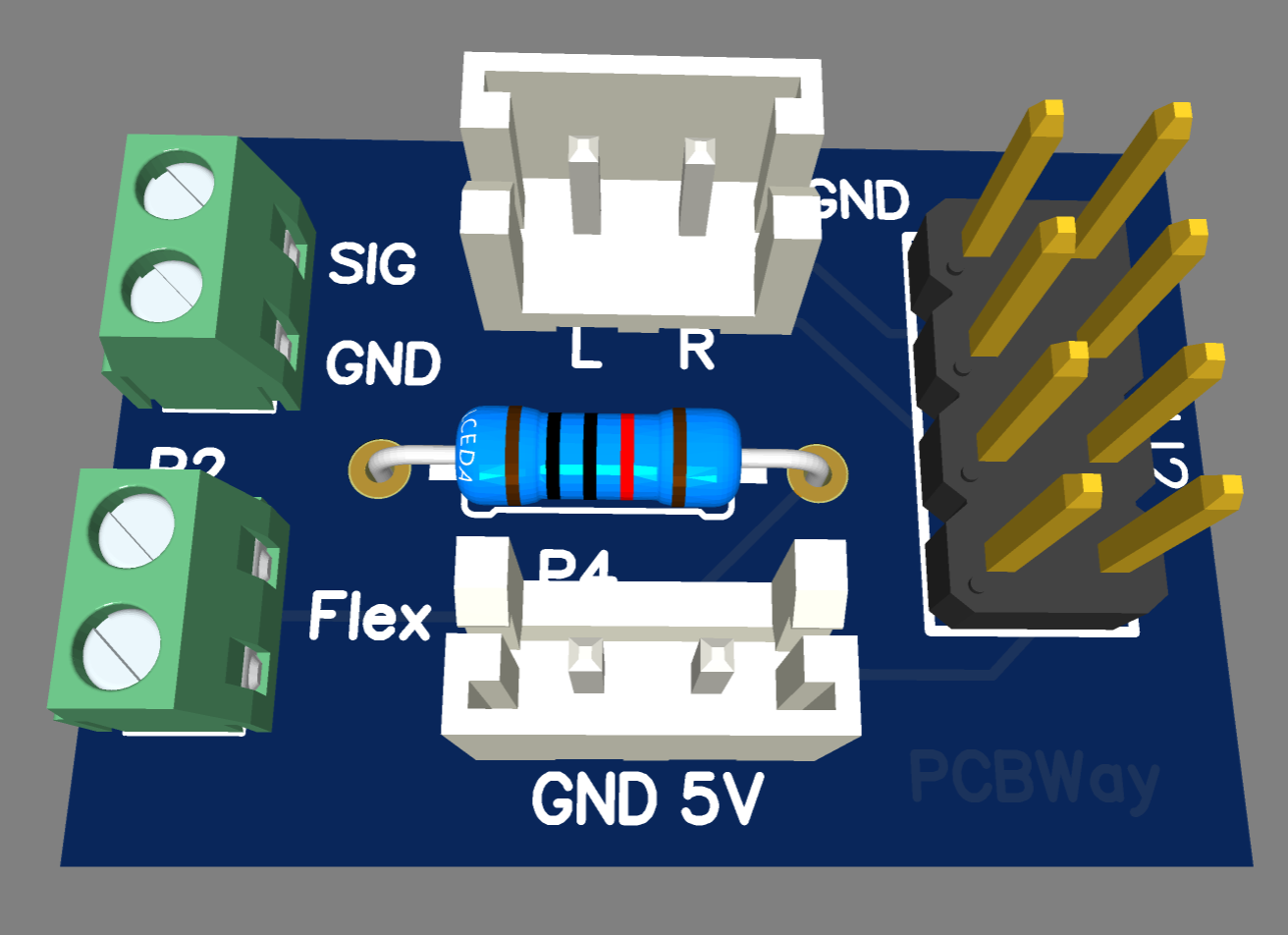
Making PCBAfter finishing the code development and testing the hardware connections I designed the schematic and PCB using EasyEDA. The schematic and the 3D view of the PCB are represented below.
The main components of the PCB are a few connectors. The motor driver, linear actuator, and flex sensor are not the components that can be directly assembled into the PCB. So, I used connectors to connect them with the nRF microcontroller.
SetupI made a plywood frame and fixed the linear actuator with nuts, bolts, and zip ties.
On the back side, I placed the motor driver and the nRF52840 board with a few screws.
Video In Action



















{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.