





Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
DroniXcar project is the winner of the Hackathon Torino 2015.
Here is a funny video of the presentation: video
HARDWARE:
DroniXcar is based on the following hardware:
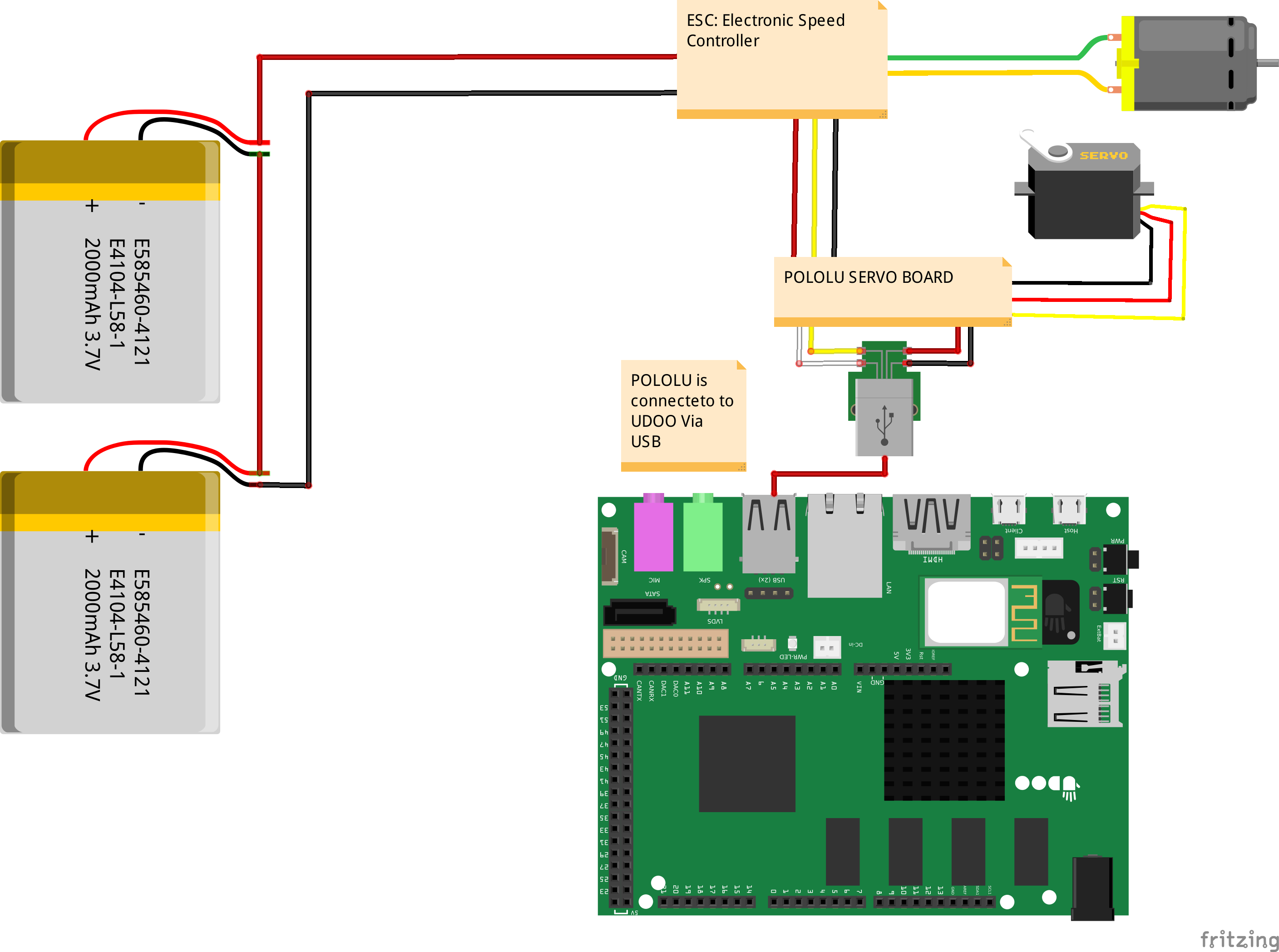
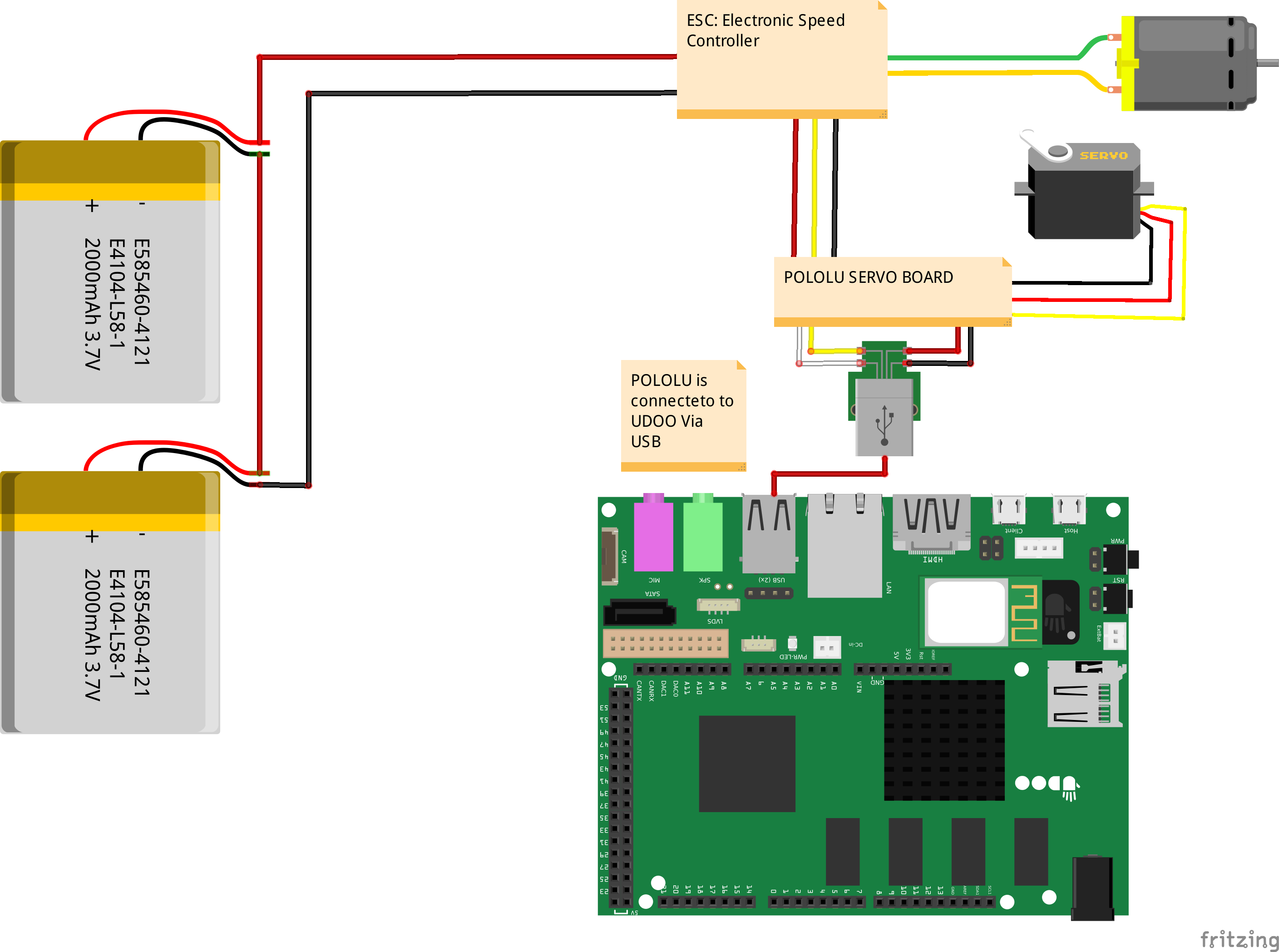
- 1 Himoto Buggy RC Car 1/10 chassis
- 1 Servo Motor (as the swerve)
- 1 Brushed Motor (as the car engine)
- 1 ESC (Electronic Speed Control to control the Brushed Motor)
- 1 UDOO Quad Board with Wi-Fi module (control unit)
- 1 Camera module for UDOO board (for video streaming)
- 1 Pololu Micro Maestro Servo Board (for control servo board and ESC)
- 1 Android Phone (as remote control)
- 1 Battery Pack (as electric power source)
The first step is to put all the components on the chassis of the RC Car, performing all the connections.
The board Pololu is connected to Udoo via USB.
Below a scheme of Pololu Board:
SOFTWARE:
UDOO Operating System:
We used UDOObuntu. Here is the installed packages list:
- motion (from apt)
- git (from apt)
- vim (from apt)
- luajit (recompiled from source)
- turbo.lua (recompiled from source)
REST API:
- For the server side, we decided to use LUA with luajit for incredible performance. The RESTful server is implemented with the library TURBO LUA. The data-model used for the comunication is JSON. API documentation: server.lua
Streaming Server:
- For the Real-Time Video Streaming from UDOO camera, we used "motion"
Pololu Software Controller:
- The pololu servo board is controlled via serial interface
/dev/ttyACM0from a simple Bash script. For more information about the serial protocol, refer to this file:
Android Application:
The Android Application was implemented with the Material Design and RXJava for "Reactive Programming"


1 project • 10 followers
I'm a software designer and engineer with proved experience with Linux Embedded devices and many micro-controllers. I'm an Android platform expert..

Thanks to Stefano Viola and Antonio Gisondi.

{kind=link}
Comments
Please log in or sign up to comment.