PurposeSmoked meat is a staple in southern American cuisine but the long patience and maintenance of the fire can make smoking meat an intimidating undertaking. An electric or propane smoker can regulate the fire by itself but those are both expensive and do not give you a good Smokey flavor. Of the smokers available on the market, charcoal ones yield the best flavors but require the most amount of work. Our goal is to give the ease of an electric smoker with the flavor of a charcoal smoker.
How a smoker worksA charcoal smoker works by burning a combustible material to generate heat with two diffusers; one to control oxygen intake, and one to control CO2 output. In order to reach the optimal smoking temperature the user must adjust the two vents manually for hours to prevent the meat from drying out or burning.
Charcoal Smoker Usage with Diffuser open
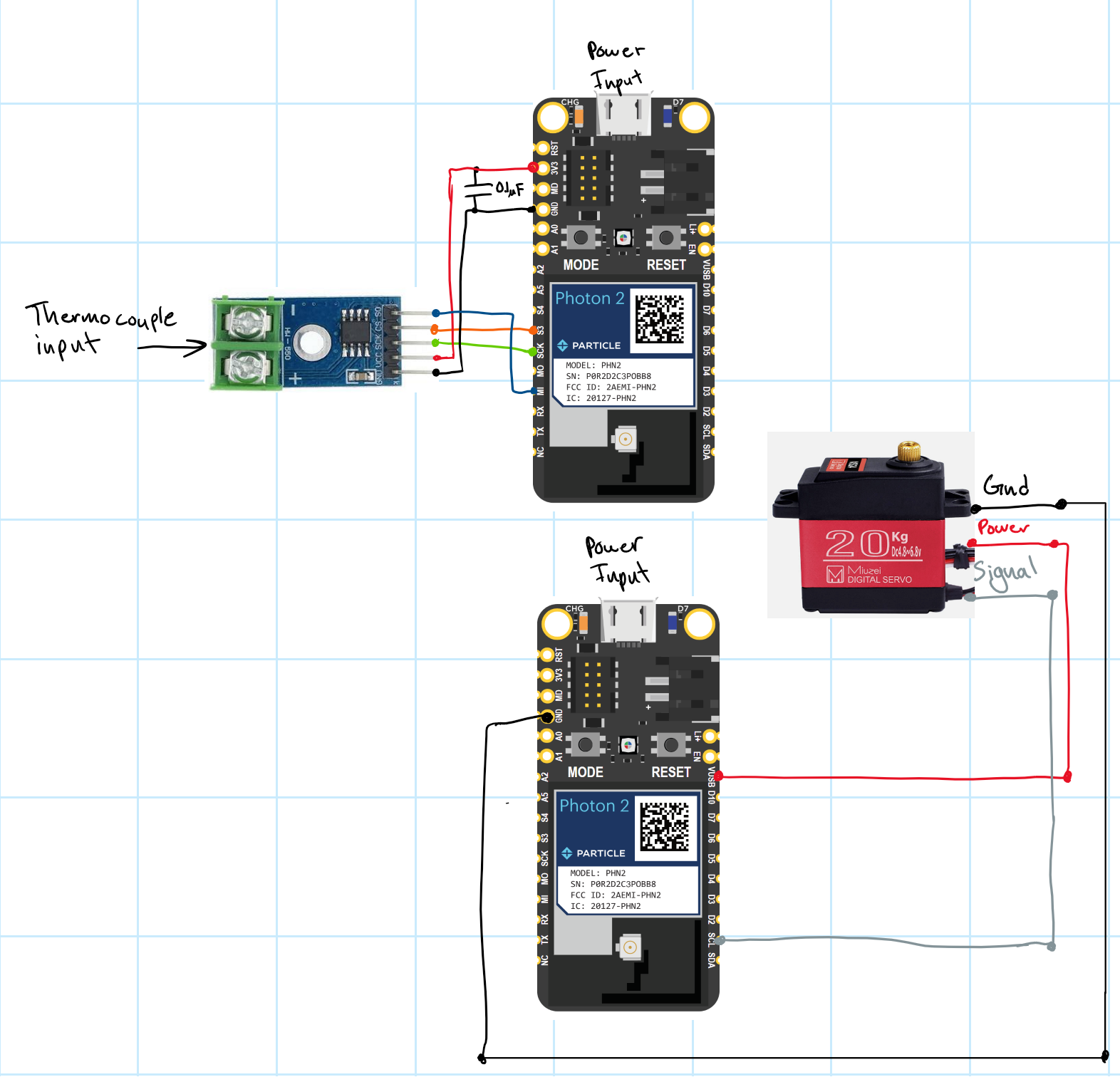
Our Internet of Things (IOT) project utilizes two Particle Photon 2 IOT devices, a thermocouple to measure the inside temperature of the smoker, and a servo motor to control the top diffuser, the CO2 output. The first Photon 2 measures the inside temperature using a thermocouple and thermocouple amplifier and records it to the cloud while also receiving the servo motor angle. The second Photon 2 reads the temperature from the cloud and controls the servo motor angle to move the top diffuser into three states: open, halfway open, and closed which increases temperature, slowly increases temp., and lower temperature respectively. Finally it publishes the servo motor angle to the cloud. Ideally the smoker should be kept between 200 - 250 F (93 - 121 C) so we want the diffuser to be open when the temperature is below 200 F, halfway open when the temperature is between 200 and 250 F, and closed when the temperature is above 250 F. By using 2 Photons we can remotely monitor and control the smoker.
Data CollectionThingSpeak.com Fahrenheit Temperature versus time
Using a ThingSpeak integration with particle the temperature values published to the cloud were also published to ThingSpeak where they were graphed. On the day we collected this data it was around 40 degrees Fahrenheit so it took a while to get a fire started. For the sake of testing and time we decided to adjust our smoker temperatures to 75, 80, and 90 Fahrenheit. The first peak at 17:30 was a try to get the fire started but it was around 17:50 that the fire was steady. The trends (17:50 onwards) show: increasing temperature up to 75 F (opened vent), slowly increasing temperature up to 90 F (halfway opened vent), and decreasing temp to 75 F (closed vent).
YouTube Video











{kind=link}
Comments
Please log in or sign up to comment.