




Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
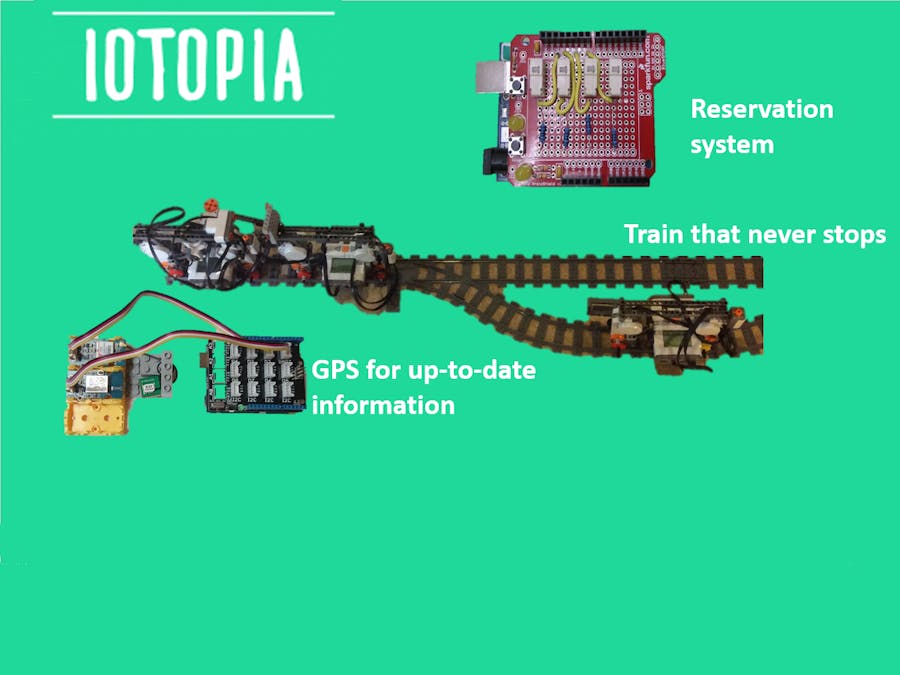
Do you also hate it when your train is late, or if you have to stand for hours in a crowded carriage, or if the remaining time on the arrival board isn't correct? We have the solution! Our concept is to develop the train of the future.
The train:
In every station, one or more carriages will be standing. Every carriage has a motor. When a train is approaching to the station. The first carriage will unlink and go to the side track. The other carriages will go straight on.
In the meantime, a carriage with passengers will leave the station. When this carriage is in front of the train, the carriage with passengers will link to the other carriages. The train is now moving to the next station.
We have realized this with a Lego NXT robot and 3D printed wheels.
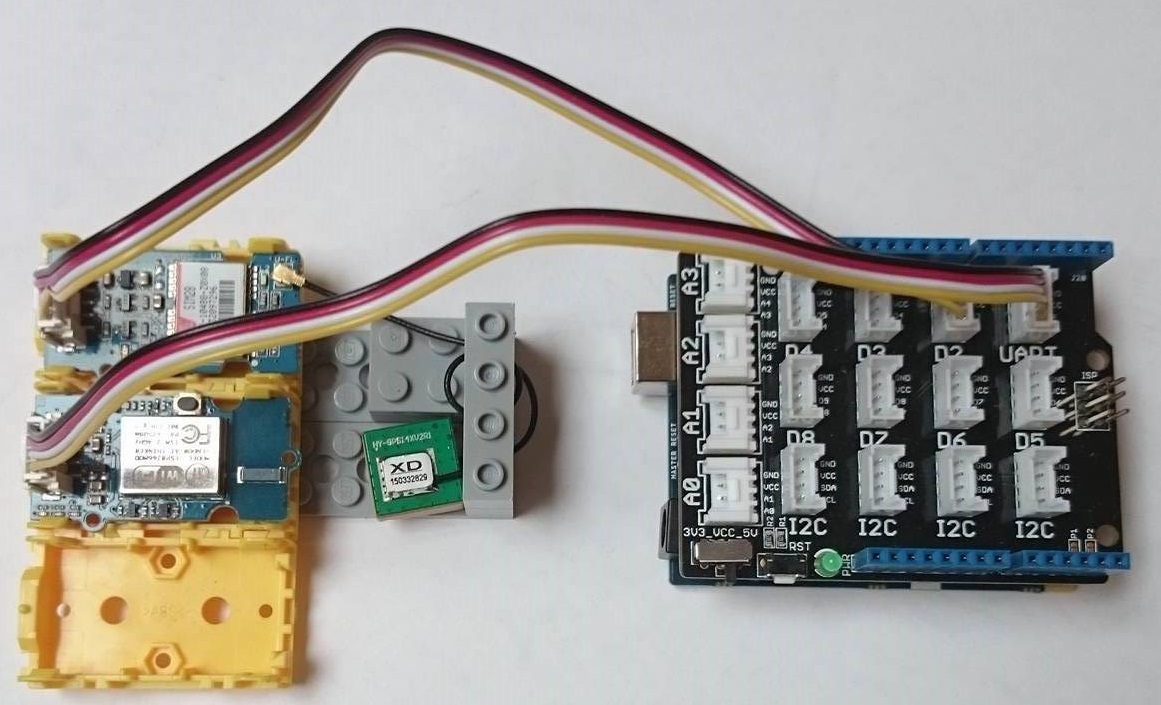
GPS:
In the train, there will be a GPS. This will give the passengers in the station up-to-date information by a mobile application.
We used an IOTOPIA rapid development kit for this part of our project.
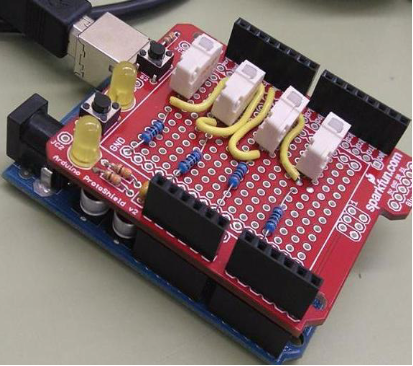
Reservation system:
We have also build a reservation system. This will prevent crowded trains. When you buy your train tickets online, you receive a password. You need to enter this password at the entrance of the train to get access to the train.
We have build the access system with an Arduino prototype shield V2, some push buttons and resistors.
Extra: Lego bricks:
This are the bricks that we have used to build our project. They are all part of the LEGO NXT set.
Project video:
To help you understand our project, we have made a short video to explain it.
End
If you have any further questions. Please ask them below in the comments.
Thank you for watching to our project,
Tom - Stijn - Thijs







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.