



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
Helping Hands By:-
Deepak Pandore, Tejas Bhoye, Ts Wabale
To help blinds to detect obstacles in their path.
Making :-
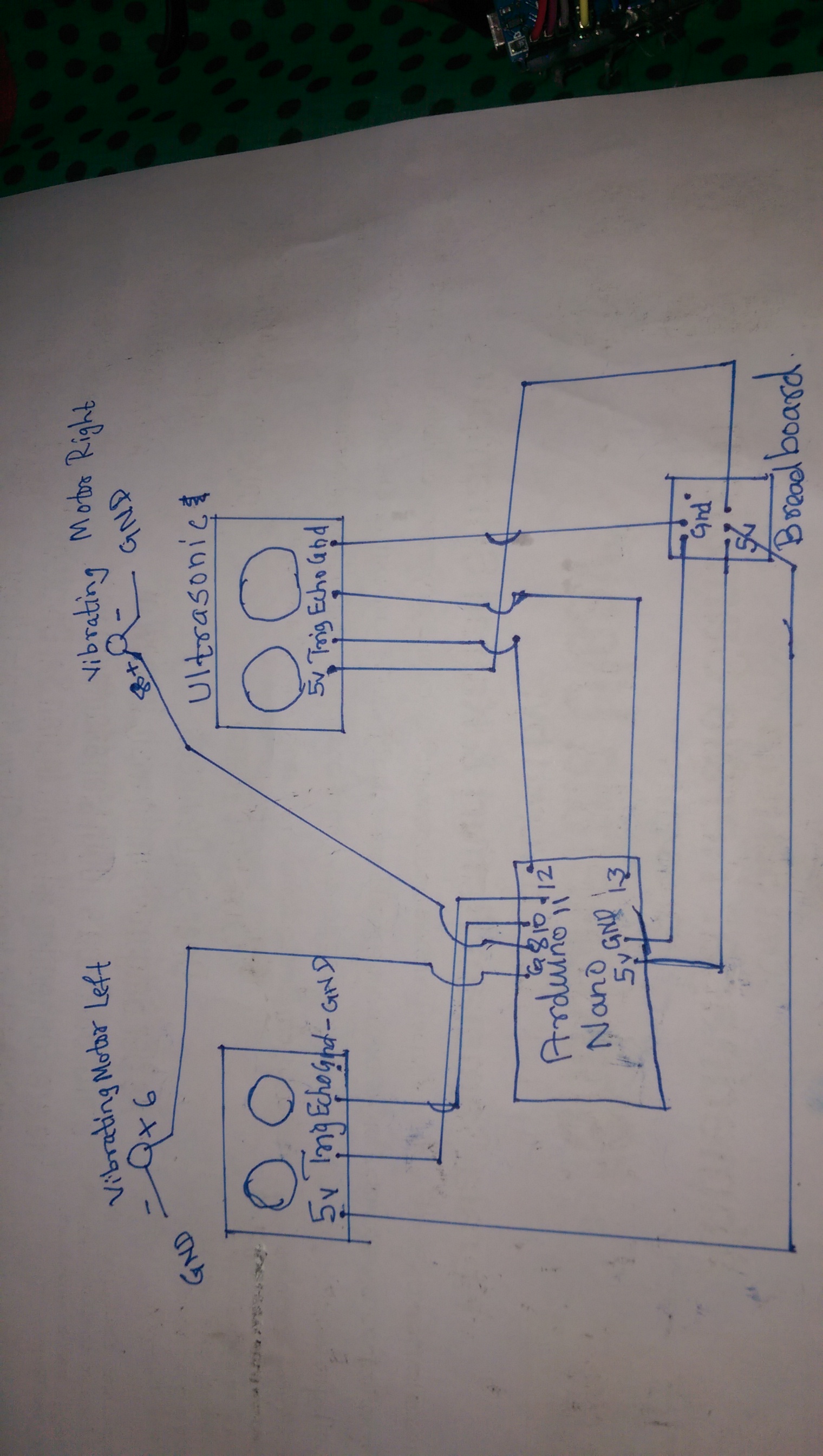
1) First we fixed ultrasonic sensors in place of
glass of goggle.
2)After that we fitted Arduino Nano (micro controller)and breadboard on the goggle.
3)Then we fitted vibrating motors on the sticks of the goggles.
4)After that we completed the connections.
5)Then we uploaded the code into Arduino.
Working :-
1) In this project there are two ultrasonic sensors fitted on both the glasses.
2) If a object is detected by the ultrasonic sensor in the right then the right vibrating motor vibrates.
3) And if object is detected by ultrasonic sensor in the left then the left vibrating motor vibrates.
4) And if the object is detected by both ultrasonic sensors at same time then the both vibrating motor vibrates.
Applications :-
1)This project will help blinds to detect
obstacles in their path.
2)It will help blinds to not fully rely on their stick.
3) We can set the range of the sensor as per the need of the blind. - - - - - - - - - - - - - - - -
Conclusion :- This project helps the blinds to detect
obstacles in their path. This project will
help blinds to avoid obstacles in their path.







{kind=link}
Comments
Please log in or sign up to comment.